パラレルリンクロボットとは? 構造やメリット・デメリット、おすすめメーカーを解説
産業の現場で活躍するパラレルリンクロボットは、その高速で精密な動作により、生産性の向上を支えています。
しかし、パラレルリンクロボットにはさまざまな種類があり、それぞれの特性やメリットを理解することが重要です。
本記事では、3種類のパラレルリンクロボットを詳しく解説し、その特性や利点を解説します。
また、記事後半では、パラレルリンクロボットのおすすめメーカーも紹介するので、ぜひ最後までご覧ください。
※JET-Roboticsの問い合わせフォームに遷移します。
※一部メーカーとは提携がない場合がありますが、ユーザー様に最適なご案内ができるよう努めています。
パラレルリンクロボットとは、特徴や仕組み構造解説
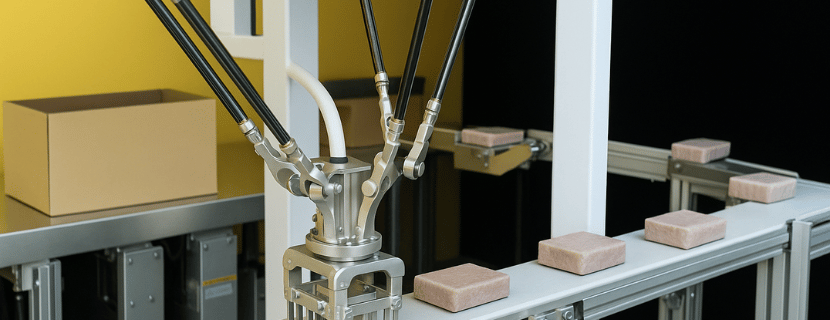
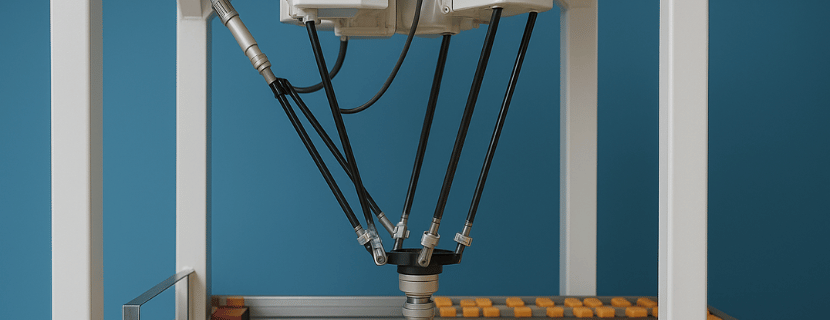
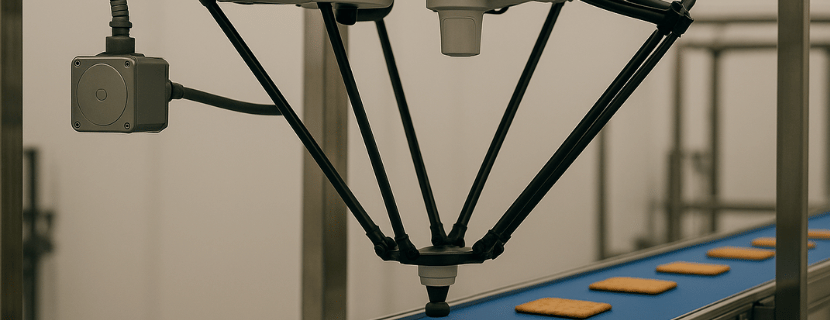
パラレルリンクロボットとは、複数のアクチュエータとリンク機構を並列に接続し、1つのエンドエフェクタを同時に制御する構造を持つロボットです。各アクチュエータは固定された基台に配置され、リンクを通じてエンドエフェクタを動かします。
この構造の特徴は、高剛性かつ軽量な可動部によって、高速・高精度な動作が可能になる点です。動力源がすべて基台に集約されているため、慣性が小さく、加減速が速いです。
また、構造上、負荷分散が効率的に行えるため、繰り返し精度にも優れています。
パラレルリンクロボットの主な活用用途としては、電子部品の高速ピッキング、医薬品や食品の包装・仕分け、精密組立、半導体製造などが挙げられます。
特に、短サイクルでの繰り返し作業や、高い位置決め精度が求められる工程での導入が進んでおり、近年はAIや画像処理技術と連携した動的な作業にも対応できるようになっています。
そして、パラレルリンクロボットの代表的な種類としては、三角構造のデルタ型や6軸自由度を持つヘキサポッド型などがあり、それぞれ用途に応じた設計がされています。
次章では、このパラレルリンクロボットの種類についてより深く見ていきましょう。
2種類のパラレルリンクロボットを解説

日本の産業現場で特に導入が進んでいるパラレルリンクロボットは「デルタ型」と「ヘキサポッド型」の2系統に大別できます。ここではそれぞれの構造・用途を概観したうえで、両者を比較した際のメリット・デメリットを整理します。
デルタ型パラレルリンクロボット
デルタ型パラレルリンクロボットは三角錐フレームと平行四辺形リンクを組み合わせ、エンドエフェクタの姿勢を保ったままXYZ方向へ超高速移動します。主に食品・医薬品のピッキングや包装ラインで導入されており、短サイクルでの繰り返し作業に強みを発揮します。
デルタロボットについてより詳しく知りたい方は、デルタロボットに特化した以下の記事をご覧ください。

ヘキサポッド型パラレルリンクロボット
ヘキサポッド型パラレルリンクロボットは6本の可変長アクチュエータで移動プラットフォームを支持し、XYZ並進+姿勢3軸を同時に制御します。半導体露光装置、光学アライメント、フライトシミュレータなど、全方向精密位置決めと高ペイロードが求められる用途で活躍します。
以上が、パラレルリンクロボットの種類になります。自社で扱うワークや予算などから考えて、適切な種類のパラレルリンクロボットを導入できるようにしておきましょう。
他のピックアンドプレース系ロボットと比較した際のパラレルリンクロボットのメリット・デメリット
本章では、パラレルリンクロボットとスカラロボットや多関節ロボットを比べて、どこが優れ、どこに注意すべきかを詳しく解説します。
パラレルリンクロボットのメリット
まず、パラレルリンクロボットはサイクルタイムが比較的高速です。リンク質量を最小化した設計によって加減速が向上するため、ライン全体のスループット向上に直結します。
また、繰り返し精度が高いこともメリットのひとつです。並列リンクが荷重を分散し合うことで剛性を確保し、摩耗によるバックラッシを抑えられるためミクロン級の繰り返し精度を維持できます。
さらに、駆動源が基台に固定されているため可動部は関節モータを持たず、オイル飛散リスクが低くクリーン設計が容易です。結果としてHACCPやGMPなど厳格な衛生基準にも適合しやすくなります。
そして、パラレルリンクロボットは、可動質量が小さいことで必要サーボ出力も抑えられるので、同等能力の直列ロボットより消費電力を低減しやすいです。
パラレルリンクロボットのデメリット
まず、パラレルリンクロボットは、アームが交差しない範囲でのみ動作可能なため、箱形の広い作業空間を必要とする工程には不向きです。
また、軽量化を優先する構造ゆえに可搬質量は数kgが上限となるケースが多く、飲料ケースなど重量物搬送にはスカラロボットや直列多関節ロボットが選ばれることが多いです。
そして、パラレルリンクロボットの高速制御には一定水準以上のサーボ更新と高分解能エンコーダが必須なので、周辺機器を含めた初期導入コストが増大しがちな点もデメリットでしょう。
加えて、リンク干渉やヤコビ行列の特異点を避けるためには、動作範囲をシミュレーションで厳密に検証した専用セル設計が不可欠なため、後付けでレイアウト変更する際の自由度が低い点も留意すべきポイントです。
以上より、自社で導入するのが本当にパラレルリンクロボットで良いのか改めて吟味することをおすすめします。
パラレルリンクロボットの導入を決めている方は、次章で製品の選び方を確認しておきましょう。
4つの比較基準 | パラレルリンクロボットの選び方
パラレルリンクを導入する際は、以下の4つのポイントを押さえる必要があります。
- リンクの長さ
- リンクの剛性
- 作業速度
- トルク
リンクの長さ
パラレルリンクロボットのリンクの長さが変わることで、作業範囲、可搬重量、速度、精度などが変化します。
長いリンクを持つパラレルリンクロボットは、作業範囲が広くなり、大きな作業スペースでの作業が可能です。また、長いリンクは、高い可搬重量を持つことができるので、重い物体を効率的に扱える利点があります。
逆に、短いリンクを持つパラレルリンクロボットは、高速作業に適しているので、加速・減速が素早く行えます。また、短いリンクは、振動や歪みが少なく、高い精度を維持できるので、精密な作業に最適です。
リンクの剛性
リンクの剛性が変化すると、ロボットの動きの精度や安定性、可動範囲が変わります。
リンクの剛性が高い場合のメリットは、ロボットの高い精度と安定性が維持されることです。また、高速動作に耐えることができ、ピッキングや組立などの精密作業に適しています。
一方で、リンクの剛性が低いパラレルリンクロボットのメリットとして、広い可動範囲を持つことができます。リンクの柔軟性が高いため、特定の作業に適しています。
作業速度
パラレルリンクロボットの作業速度は、CPM(Cycles Per Minute)と呼ばれる指標で表され、ロボットの作業効率に影響します。
これは、特定の動作パターンでロボットが動ける回数(速さ)を示しています。ただし、実際の動作ではロボットがワークを吸着・離脱(掴む・離す)する時間も考慮する必要があります。
作業速度が高いパラレルリンクロボットのメリットは、高速な作業が可能で生産性が向上することです。また、一定の精度を保ちながら素早くタスクを遂行できるため、24時間稼働が実現でき、人手不足の解消にもつながります。
一方、作業速度が低い場合のメリットは、精密な作業が求められる場合に適していることです。作業範囲が狭いため正確な位置決めが可能であり、高重量な物体を扱う必要がない場合に効率的です。
トルク
トルクが高い場合、パラレルリンクロボットは重い物体を持ち上げたり、高い速度で動作したりできます。逆に、トルクが低い場合、制限された重量しか扱えません。
また、トルクが高いパラレルリンクロボットは、高い負荷をかけても安定した動作が可能です。
一方、トルクが低い場合は、アクチュエータが軽量でコンパクトであり、電力消費が少ないという利点もあります。
上記の視点から複合的に判断して、自社に導入するパラレルリンクロボットを選ぶのがおすすめです。
次章では、実際にパラレルリンクロボットを製造しているメーカーを見ていきます。
パラレルリンクロボットを製造するおすすめのメーカーを紹介
パラレルリンクロボットを製造する主なメーカーには、以下の会社が挙げられます。
※JET-Roboticsの問い合わせフォームに遷移します。
※一部メーカーとは提携がない場合がありますが、ユーザー様に最適なご案内ができるよう努めています。
- パナソニック / Panasonic
- 安川電機 / YASKAWA Electric
※クリックで各メーカーの詳細に飛べます。
パナソニック/Panasonic
| 会社名 | パナソニック/Panasonic |
| 設立年 | 1935年 |
| 本社 | 大阪府門真市大字門真1006 |
| 概要 | 家電・空質空調・食品流通・電気設備・デバイスなどのメーカー |
パナソニック・ホールディングスは1935年に設立され、大阪府門真市に本社を構える画像処理とFAを融合する総合電気メーカーです。 独自の3Dビジョン・力覚センサーとの統合/電子実装機とのライン連携を強みとしています。
同社はパラレルリンクロボットとしてPLRシリーズを製造しています。 これは高い挿入精度と自動軌道補正、電子部品実装フローへシームレス接続が可能な点が強みです。
具体的には、電子部品の自動挿入やトマト収穫ロボ、SMT工程の基盤自動塗布セルなどで導入が進んでいます。
安川電機/YASKAWA Electric
| 会社名 | 安川電機/YASKAWA Electric |
| 設立年 | 1915年 |
| 本社 | 福岡県北九州市八幡西区黒崎城石2番1号 |
| 概要 | サーボモータ、インバータ、産業用ロボットのメーカー |
安川電機は、福岡県北九州市に本社を構える「メカトロニクス」という言葉を生んだ制御機器とサーボ技術に強みを持つメーカーです。
同社はパラレルリンクロボットとして、Motoman MPP3H/MPP3Sといったデルタ型モデルを展開しています。これらは食品用グリースを標準装備し、高速サイクル動作を実現します。
ホタテの自動供給ラインや、パウチ製品の投入システム、多列パックの包装デモなどで活用されています。
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
パラレルリンクロボットの製品はまだありません。