【2026年最新】USV(無人水上艇)とは? 特徴や選び方、おすすめメーカーを解説
USV(無人水上船)は、遠隔操作や自律航行により、さまざまな業務を遂行できる革新的な技術です。
しかし、「どのような用途に適しているのか?」「導入する際のメリットやデメリットは?」「どのメーカーを選べばよいのか?」といった疑問を抱える方も多いのではないでしょうか。
本記事では、USVの基本情報から活用事例、選び方のポイント、そしておすすめメーカーの紹介までを詳しく解説します。
USV導入を検討している方は、ぜひ最後までご覧いただき、最適な選択に役立ててください。
また、JET-Roboticsでは、USV以外にも水上ドローンを解説する記事もアップしています。水上ドローンの全体像について詳しく知りたい方は以下をご覧ください。

USV(無人水上艇)全製品(1件)
 タイル形式
タイル形式 リスト形式
リスト形式
1-1 / 1件

| 製品 | 詳細情報 |
|---|---|
|
🏆注目
176人が閲覧しました
メーカー:炎重工株式会社特徴:水上のFPVカメラと船底の水中カメラで、水面からの「見る」「撮る」「測る」仕事を行える 通信距離は300m(※)、安全な場所から遠隔操作可能。片手で「直感的に操船できる」やさしい操作性、船舶免許不要ですぐに使える 全長0.6m軽量約7kg、一人で現場へ持ち運び、準備から使用・片づけまで一人で完結できる (※)FPVプロポによる遠隔操作の場合。エディションにより通信距離に制限のないVPN接続もあります。 |
1-1 / 1件
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
USV(無人水上艇)の基礎知識や導入のポイントについては、以下の解説をご覧ください。
USV(無人水上船)は、遠隔操作や自律航行により、さまざまな業務を遂行できる革新的な技術です。
しかし、「どのような用途に適しているのか?」「導入する際のメリットやデメリットは?」「どのメーカーを選べばよいのか?」といった疑問を抱える方も多いのではないでしょうか。
本記事では、USVの基本情報から活用事例、選び方のポイント、そしておすすめメーカーの紹介までを詳しく解説します。
USV導入を検討している方は、ぜひ最後までご覧いただき、最適な選択に役立ててください。
※JET-Roboticsの問い合わせフォームに遷移します。
※一部メーカーとは提携がない場合がありますが、ユーザー様に最適なご案内ができるよう努めています。
また、JET-Roboticsでは、USV以外にも水上ドローンを解説する記事もアップしています。水上ドローンの全体像について詳しく知りたい方は以下をご覧ください。
目次
最近の更新内容
2026/3/5更新 コンテンツの一部修正と追加
【2026年最新情報】USV市場と技術の最前線
USVを取り巻く環境は、技術革新と社会実装の加速で日々進化しています。ここでは、直近の市場・ルール・技術トレンドをかいつまんで整理します。
市場動向:需要の裾野が拡大
洋上風力の保守・点検、沿岸警備、環境モニタリングを中心に導入が広がり、各国で実証から業務運用への移行が進んでいます。欧米に加えてアジア勢の参入が増え、用途特化型から汎用プラットフォームまで選択肢が拡充しました。
ルール整備:MASSコードと国内ガイドライン
IMOのMASSコードは最終化に向けた議論が進行中で、目標指向・リスクベースの枠組みが軸となっています。国内でも自律運航・遠隔操縦に関する安全ガイドラインの改訂が相次ぎ、遠隔操縦者の要件や自律判断時の遵守事項がより明確になりつつあります。
技術トレンド:群制御とゼロエミッション化
AIによる群制御(スウォーム)は実用段階に入り、少人数で複数艇を協調運用するケースが増加。エネルギー面では電動・ハイブリッドの高度化に加え、水素燃料電池の実証も進み、長期・低排出運用の選択肢が広がっています。
USVとは? 特徴や活用事例を解説

USV(Unmanned Surface Vehicle)とは、遠隔操縦または自律制御で水上を航行する無人船舶の総称です。
有人船に比べて小型軽量でも高性能センサーを集約でき、沿岸域から外洋まで幅広いミッションを担います。
国際海事機関(IMO)は海上自律船の自律度を4段階で定義しており、USVは遠隔操縦船(Degree 2)から完全自律船(Degree 4)までを含みます。
| Degree | IMOによる定義概要 | USVの該当範囲 |
|---|---|---|
| 1 | 船内システムは自動化・意思決定支援を備えるが、操船や監視は乗員が行う。 | 大型商船の自動化レベルであり、USVは通常該当しない。 |
| 2 | リモートセンターから操船可能。異常時の操作のため乗員が同乗する。 | 港湾試験中の実証USVや実習船型USVが該当。 |
| 3 | 乗員なし。操船・監視を完全に陸上や母船から遠隔で行う。 | 商用化が進むROSV(遠隔操作USV)の大半がここに位置。 |
| 4 | 乗員なし。船が自律判断し航行・避航・ミッションを完結する。 | AI航法を備えたASVや長期観測USVがここに該当。 |
上表は国際海事機関(IMO)が公表した「Maritime Autonomous Surface Ship(MASS)」の4段階の自律度区分を要約したものです。
USV(無人水上艇)は実運用フェーズに応じてDegree 2〜4に位置付けられます。
船体サイズは数十センチの測量ドローンから40 m級の試験艦まで多岐にわたり、代表例として23 フィート(約7 m)の「Saildrone Explorer」や132 フィート(約40 m)の米国「Sea Hunter」が知られます。
USVの定義と基本構造を解説
USVは船体、推進装置、センサー、通信システム、制御アルゴリズムの5要素で構成されます。
船体材料はFRP(繊維強化プラスチック)が主流で、20 m以下の船では約80%を占めるとの報告があります。
アルミ合金やカーボンコンポジットを採用した軽量モデルも増えており、航続距離と耐久性の両立が進んでいます。
推進装置は電動モーター、ハイブリッドディーゼル、帆走+ソーラーなど運用目的に応じて選択されます。
主な活用事例を解説 | USVができることは?
USVは環境モニタリング、災害対応、港湾物流、気候観測、防衛など多岐の海洋分野で実運用が進んでいます。
- 海洋調査事例:海底地形測量や水質モニタリングで有人船の航行リスクを低減します。
- 防災事例:津波・高潮時の迅速な被災状況把握で初動対応を高速化します。
- 港湾物流事例:自動着桟と無人搬送で港湾効率を向上します。
- 気候観測事例:Saildrone Explorerが南極海やハリケーン内部でCO2フラックスと最大126 mphの風速データを取得し、気候モデル精度向上に貢献します。
- 防衛事例:DARPAのSea Hunterトリマランは対潜水艦哨戒を想定した長期自律航行試験を米海軍と継続しています。
このようにUSVは科学研究から安全保障まで幅広い課題解決に寄与しており、導入に際してはミッション特性に応じた船体サイズ・制御方式・センサー構成を見極めることが重要です。
ここまででUSVの定義と活用事例を整理しました。次の章では「無人航走体UUVとUSVの関係」を解説します。
無人航走体UUVとUSVの関係を解説
UUV(Unmanned Underwater Vehicle)とは水中を航行する無人機です。
水上で活躍するUSVと連携することで水上と水中を途切れなくカバーします。
通信ゲートウェイや発着母艦としてUSVを活用し、海底探査・機雷戦・海洋観測などの作業効率を高める構成が世界各国の官民プロジェクトで一般化しつつあります。
USVとUUVの技術的違い
航行環境が異なるため、USVとUUVでは推進方式と通信・測位手法が大きく変わります。
USVは空中のGNSSを直接受信し、衛星回線やLTEで高帯域のリアルタイム通信が可能です。
一方UUVは電波が減衰する水中を移動するため、DVL/INS併用の慣性航法で自己位置を推定し、データ伝送には音響モデム(NATO標準JANUSなど)や短距離光通信を用います。
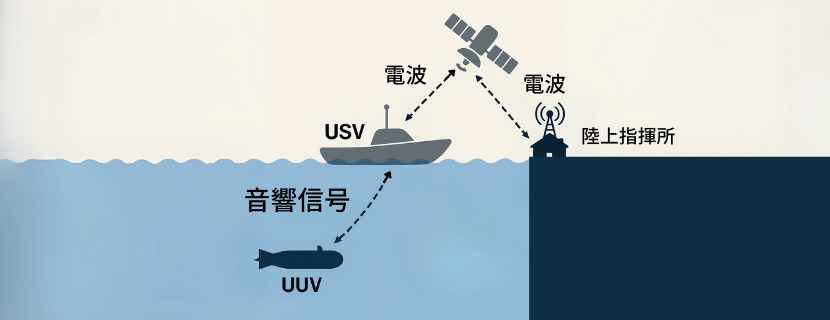
このギャップを解消するため、USVは水上で「音響信号 ↔ 電波」を変換する通信ゲートウェイとして機能します。
海底のセンサーやUUVは水中用の音響モデムでデータを送信しますが、電波は水中では届きません。USVはその音響データを受信し、電波に変換して衛星や陸上指揮所へ転送し、逆に陸上からの指令も電波で受け取り音響信号に変換してUUVへ届ける橋渡し役を担います。
以下の画像はイメージ図です。
協調運用のメリット
- カバー範囲拡大:USVが水上で通信リレーを担うことで、UUVは母船から遠く離れた深海でも長時間潜航できます。
- データ即時取得:水中で取得した音響データをUSV経由で電波に変換し、衛星や陸上回線へ送ることでリアルタイム解析が可能になります。
- 運用コスト削減:USVが母艦機能を兼ねるため、有人船のチャーター時間や乗組員数を削減できます。
- 安全性向上:危険海域や悪天候時でも、無人システム同士の連携により人員を現場に出さずに作業が行えます。
- 冗長性強化:通信経路が多段化されるため、水中・水上どちらかが途絶しても別経路でデータと指令を維持できます。
- スケーラビリティ:複数のUSVとUUVを同じ指揮系統に統合しやすく、調査規模や任務難度に応じて台数を柔軟に追加できます。
相互補完するUUVとUSVの役割を理解すると、目的に合わせたシステム構成を最適化しやすくなります。
続いて各種USVのメリットとデメリットを解説します。
種類ごとにUSVを解説

USVは操縦方式によってASV(Autonomous Surface Vehicle)とROSV(Remotely Operated Surface Vehicle)の2つに分類されることが多いですが、実際の製品は遠隔操作機能と自律機能を併せ持つハイブリッドも存在します。
以下では理解しやすいように代表的な2分類で特徴を整理します。
ASV(Autonomous Surface Vehicle)
ASV(Autonomous Surface Vehicle)は、USVの中でもAIやセンサーで自律判断し、自分で進路や速度を決めて走るタイプを指します。
風力や太陽光を補助動力に使うハイブリッド型、ディーゼル‐電動の並列ハイブリッド型など推進方式が多様化し、長期の洋上観測や広域巡回に活用されています。
ROSV(Remotely Operated Surface Vehicle)
ROSVはオペレーターが陸上管制室や近傍母船からリアルタイムに操船指令を送る遠隔操作型USVです。
映像、AIS、音響など複数のセンサー情報をストリーミングし、人間の判断で細かな操船や作業を行うため、港湾警備・狭水域点検・短距離物資輸送など即応性の高いミッションで広く運用されています。
2種類の制御方式を把握すると、自社の運用シナリオに合わせたUSV選定が容易になります。次の章では、USV導入のメリットと課題を解説します。
USV導入のメリットと課題を総覧

USVを導入することで得られる利点と、解決すべき課題を同じ枠組みで把握すると、投資対効果とリスク対策を同時に検討できます。以下に主要なメリットと課題をまとめました。
USV導入メリット
次にUSV導入時の課題を確認しましょう。
USV導入時の課題
上記のメリットと課題を確認したうえで、自社にとって最適なUSVを導入することが重要です。
次に、USVを含む無人運航船のプロジェクトについて解説します。
国内無人運航船プロジェクト「MEGURI 2040」とUSVへの波及効果

MEGURI 2040とは、日本財団が中心となり官民学のパートナーが結集して進める無人運航船プロジェクトで、2040年までに完全遠隔・自律航行を商用レベルで実現することを目的としています。
ここからは、プロジェクト全体像と各ステージの進捗、そしてUSV分野に波及する具体的なメリットを順に見ていきましょう。
プロジェクト全体像
日本財団が主導するMEGURI 2040は、2040年までに商用レベルの無人運航船(MASS)を実用化することを目標に、造船・通信・IT各社と学術機関が連携する国家プロジェクトです。
重点領域は以下の三本柱で構成されています。
①遠隔操船/自律航行技術の確立
②陸上支援センター(Fleet Operation Center)の実装
③保険や国際ルールを含む社会受容性の整備
大型フェリーやコンテナ船で培う知見は、小型USVにも展開できる共通基盤となります。
Stage 1・Stage 2 の進捗まとめ
-
Stage 1(2020–2022年):技術実証フェーズ
5コンソーシアム・6隻が参加し、以下を達成しました。- 全長190 mフェリー〈さんふらわあ しれとこ〉で自動離着桟と自律航行を実証。
- DFFASコンソーシアムが約790 kmを完全自律で往復し、衝突回避とエネルギー最適化を検証。
- RORO貨物船や沿岸コンテナ船に自動操船を後付けし、複数船型で汎用性を確認。
-
Stage 2(2023–2026年):社会実装フェーズ
4隻の実証船で商用航路運用を見据えた検証を進行中です。- 2025年に陸上支援センターから複数船を同時監視・操船する遠隔運航デモを計画。
- 遠隔操縦資格や保険スキーム、COLREG対応アルゴリズムなどの法制度整備を支援。
- 実証データを基に、運航コスト・保守体制・保険料率など商用モデルを策定中。
Stage 1 の成果と課題は Stage 2 に反映され、2025 年の複数船同時遠隔運航デモ後に商用運航モデルの確立を目指しています。
USV分野への波及効果
MEGURI 2040の進捗をウォッチすることで、国内でUSVを導入する際の法規制・技術要件・保険枠組みの最新動向を先読みできます。
では次の章では、USVの選び方を解説します。自社の目的に適したUSVを導入するためにも是非ご一読ください。
USVの選び方を解説

USVを導入する際には性能や運用コストだけでなく長期的な実務への適合性を見極める選定基準が重要です。
海象条件に合わせた船体形状・サイズ
USVの選定ポイントとして運用海域の波高・潮流に耐えられる船体形状・サイズを選定する点が挙げられます。
この判断は、推進方式や喫水、堅牢度、船級認証、想定海象データといった複数の要因によって左右されます。
適切に検討しない場合、環境条件に合わず転覆や機関故障が増えて稼働停止リスクが高まるため、外洋調査や波浪の大きい季節に連続運用する際には特に重視する必要があるでしょう。
荒天時でもミッションを中断せず安全に遂行でき稼働率が向上します。
自律航行レベルと冗長制御
USVの選定ポイントとして目的に応じた自律航行レベル(遠隔操縦・半自律・完全自律)と冗長制御系を選ぶことが大切です。
このレベルはGNSS/INS精度、障害物検知センサ、AI航法アルゴリズム、通信帯域、関連法規準拠といった技術要素によって決まります。
自律機能が不足すると操船負荷が増え通信断や人的エラーで事故が起こりやすくなるため、広域インフラ点検や危険水域で人が常駐できない場合には特に注意が必要になります。
最少人数で複数艇を同時運用でき長距離・長時間の巡回が可能になるでしょう。
ペイロード容量と電力供給
USVの選定ポイントとしてミッション用センサやサンプリング装置を無改造で搭載できるペイロード容量・電力供給を確保することが欠かせません。
この要件はデッキスペース、耐荷重、電力バス容量、データインタフェース(Ethernet/Serial/PoE)仕様などに左右されます。
容量が不足すると後付け改造費がかさみ計測精度が落ちプロジェクトが遅延するため、多波束測深機や水質プローブのように重量や消費電力が大きい装置を使う案件では特に留意してください。
導入直後から高精度データ取得が実現し投資回収が早まります。
最後に、USVのおすすめメーカーを紹介します。
おすすめUSVメーカーを紹介

国内外で多様なUSVが登場する中、導入目的や運用環境に適したメーカーを選ぶことが成功の鍵です。
この章ではおすすめのUSVメーカーをご紹介します。詳しい話が聞きたい方は以下よりお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
※一部メーカーとは提携がない場合がありますが、ユーザー様に最適なご案内ができるよう努めています。
- 炎重工 / Homura Heavy Industries
- ヤンマー / Yanmar
- 三井E&S / Mitsui E&S
- 三菱重工業 / Mitsubishi Heavy Industries
※クリックすると該当箇所まで飛びます
炎重工 / Homura Heavy Industries
| 会社名 | 炎重工 / Homura Heavy Industries |
| 設立年 | 2016年 |
| 本社 | 岩手県滝沢市穴口57-9 |
| 概要 | 「制御技術」を活用した屋外向け自動化製品 及び サービスの企画・開発・製造・販売・保守など 特に水辺の領域を得意とし、 水上ドローン (USV/ASV)、遠隔監視用水中カメラ、及び 生体群制御® など |
炎重工は、屋外環境に対する経験を生かし、生物の行動を制御する生体群制御、及び機械の動作を制御するロボット技術の開発を行っている会社です。これらの技術を組み合わせ、現場主義・実用志向にて一次産業における食料生産のデジタル化・工業化を進めています。
USVとして、「超小型水上ドローン Swimmy Eye」を展開しています。水上のFPVカメラと船底の水中カメラで、水面からの「見る」「撮る」「測る」仕事を行えるのが特徴で、全長0.6m、重量約7kgのため、一人で現場へ持ち運び、準備から使用・片づけまで一人で完結できます。
点検、調査、測量、確認、監視、見回り、水面からの撮影、下水道など管渠・暗渠の調査・点検に使用できます。人が入りにくい桁下の低い橋梁や、草木の生い茂る水門・護岸などにもスイスイ近づくことが可能です。詳しくはお問い合わせください。
ヤンマー / Yanmar
| 会社名 | ヤンマー / Yanmar |
| 設立年 | 1912年 |
| 本社 | 大阪府大阪市北区茶屋町1番32号 YANMAR FLYING-Y BUILDING |
| 概要 | ディーゼルエンジンを核とする総合機械メーカー |
ヤンマーは、自社エンジンとRTK-GNSSを組み合わせた高精度自律航行と自動着桟技術に強みがあります。
試験艇Auto-navigation Robotic Boatを中心に実証を重ねており、自己復元構造で48時間連続航行と自動ドッキングを両立する点が特徴です。
この性能はJAMSTECの海洋資源モニタリングSIP実証で長時間観測に採用され実績を示しています。
三井E&S / Mitsui E&S
| 会社名 | 三井E&S / Mitsui E&S |
| 設立年 | 1937年 |
| 本社 | 東京都中央区築地5丁目6番4号 |
| 概要 | 重工・インフラ検査装置メーカー |
三井E&Sは、AUV連携型USVや機雷処分向けモデルなど海洋調査と防衛の両面で豊富な開発実績を有します。
主な製品は洋上中継器ASV、USV1号機、機雷処分用USVです。AUV展開回収と衛星通信ゲートウェイを兼ねる多機能性が際立つでしょう。
Shell Ocean Discovery XPRIZE準優勝のTeam KUROSHIOで実戦投入され国際舞台でも評価されています。
三菱重工業 / Mitsubishi Heavy Industries
| 会社名 | 三菱重工業 / Mitsubishi Heavy Industries |
| 設立年 | 1950年 |
| 本社 | 東京都千代田区丸の内3丁目2-3 丸の内二重橋ビル |
| 概要 | 宇宙・重機の総合メーカー |
三菱重工業は、艦艇用ロボティクスと大型船舶統合技術に強みを持ち、防衛装備庁の委託で大型USV試作艇(正式名称未公表)を開発中です。
機雷戦や洋上監視など防衛用途を見据えた独自プラットフォームが特徴です。
2025年度に防衛装備庁と試作契約を締結し、海上自衛隊向け試験で運用実績を積んでいます。
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。