【2026年版】ステッピングモーターとは? 種類と特徴、選び方のポイントとおすすめメーカーをご紹介
ステッピングモーターは、位置決め精度や制御のしやすさが求められる装置で広く使われているモーターです。
本記事では、ユニポーラ型やハイブリッド型など、12種類のステッピングモーターの特徴を整理しながら解説します。さらに、トルク・回転速度などの比較ポイントを踏まえた選び方や、導入検討時に比較しやすいメーカーも紹介します。
シンプルな装置から精密な機器まで、用途に合ったモーターを選ぶ際の判断材料としてぜひ参考にしてください。
最近の更新内容
2026/3/27更新 コンテンツの一部修正
【2026年版】ステッピングモーターの種類と特徴
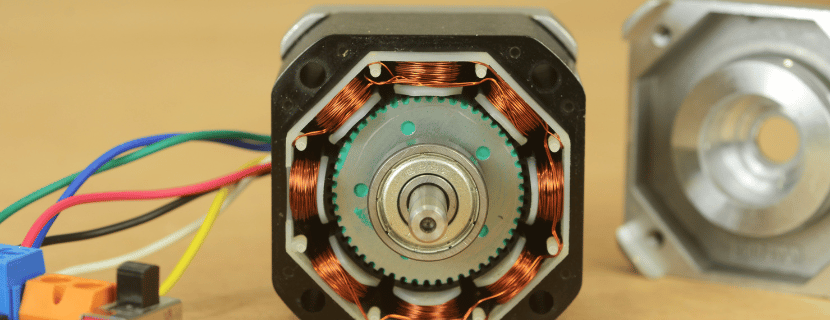
ステッピングモーターは、パルス信号に応じて一定角度ずつ回転させやすいモーターです。電気信号によって磁界を発生させ、その切り替えに合わせてローターを段階的に動かすことで、位置や回転量を制御します。位置決めが重要な装置で採用されることが多く、用途によってはオープンループで構成しやすい点も特長です。
また、起動・停止を繰り返す制御と相性がよい製品が多く、3Dプリンター、ロボット、自動改札機、医療機器など、幅広い分野で利用されています。
ただし、ステッピングモーターの種類はひとつの切り口だけで整理できるものではありません。ここでは、構造・励磁方式・相数・制御方式・駆動方式をまたいで、代表的な12種類を整理して紹介します。
- ユニポーラ型ステッピングモーター
- バイポーラ型ステッピングモーター
- VR型(可変リラクタンス型)ステッピングモーター
- PM型(永久磁石型)ステッピングモーター
- HB型(ハイブリッド型)ステッピングモーター
- 2相ステッピングモーター
- 3相ステッピングモーター
- 5相ステッピングモーター
- リニアステッピングモーター
- クローズドループステッピングモーター
- オープンループステッピングモーター
- マイクロステップステッピングモーター
※クリックすると該当箇所まで飛びます
ユニポーラ型ステッピングモーター
ユニポーラ型ステッピングモーターは、コイルのセンタータップを利用し、各巻線に一方向の電流を流して駆動する方式です。ドライバ回路を比較的シンプルにまとめやすく、扱いやすさを重視する場面で選ばれることがあります。
この種類のモーターには、以下のような特徴があります。
- 制御回路を比較的シンプルに構成しやすい
- ドライバ設計のハードルを抑えやすい
- コストを重視する用途に向きやすい
ユニポーラ型ステッピングモーターは、シンプルな制御が求められる装置や、軽負荷で扱いやすさを優先したい用途に適しています。
バイポーラ型ステッピングモーター
バイポーラ型ステッピングモーターは、各コイルに双方向の電流を流して駆動する方式です。電流方向を切り替えて磁界を反転させるため、ユニポーラ型に比べて巻線を有効に使いやすく、より高いトルクを取りやすい構成として採用されることがあります。
この種類のモーターには、以下のような特徴があります。
- 高いトルクを得やすい
- 精密な位置制御に対応しやすい
- ユニポーラ型よりドライバ回路は複雑になりやすい
バイポーラ型ステッピングモーターは、高トルクが必要な装置や、精密な位置決めが求められる機器でよく使われます。特に、産業用機器や高負荷の駆動装置と相性のよい方式です。
VR型(可変リラクタンス型)ステッピングモーター
VR型ステッピングモーターは、ローターに永久磁石を使わず、磁気抵抗の変化を利用して回転するタイプです。ステータの磁場変化に応じて、ローターがもっとも通磁しやすい位置へ動く仕組みで、構造を比較的シンプルにしやすいのが特長です。
この種類のモーターには、以下のような特徴があります。
- 構造が比較的シンプル
- 高速回転が求められる条件で使われることがある
- 永久磁石を使わないため、ローター構造を簡素化しやすい
VR型ステッピングモーターは、高速回転や軽負荷での位置決めが必要な用途に向いています。オフィス機器や一部の電装用途で採用される例もあります。
PM型(永久磁石型)ステッピングモーター
PM型ステッピングモーターは、ローターに永久磁石を用いたタイプです。ステータ側の磁界変化に応じてローターが追従して回転し、低速域でも扱いやすいトルクや保持力を得やすい構成です。
この種類のモーターには、以下のような特徴があります。
- トルクを確保しやすい
- 位置決め用途に使いやすい
- 低速域で安定した動作を求める場面と相性がよい
PM型ステッピングモーターは、位置決め精度とトルクの両方を重視する装置で使われることがあります。プリンターや医療機器などで見かけることもあります。
HB型(ハイブリッド型)ステッピングモーター
HB型ステッピングモーターは、VR型(可変リラクタンス型)とPM型(永久磁石型)の特長を組み合わせたタイプです。ステッピングモーターの中でも広く使われる構成のひとつで、精度とトルクのバランスを取りやすい点が強みです。
この種類のモーターには、以下のような特徴があります。
- 高いトルクを確保しやすい
- 高精度な位置決めに対応しやすい
- 幅広い用途に展開しやすい
HB型ステッピングモーターは、トルクと精度の両方が求められる用途で検討されやすいタイプです。産業用機器、ロボティクス、医療機器などで広く活用されています。
2相ステッピングモーター
2相ステッピングモーターは、2つの相を持つ一般的な構成です。制御しやすく、コストと性能のバランスを取りやすいため、幅広い用途で使われています。
この種類のモーターには、以下のような特徴があります。
- 構造が比較的シンプル
- 制御回路を組みやすい
- 標準的な用途に適用しやすい
2相ステッピングモーターは、コストを抑えながら基本性能を確保したい場合に選びやすい方式です。プリンターや小型機器の駆動装置など、採用例も多く見られます。
3相ステッピングモーター
3相ステッピングモーターは、3つの相を順次駆動して回転させる構成です。2相に比べて回転が滑らかになりやすく、振動を抑えたい用途で検討されることがあります。
この種類のモーターには、以下のような特徴があります。
- 滑らかな回転を得やすい
- 高速域でも安定性を確保しやすい場合がある
- 振動を抑えたい用途に向きやすい
3相ステッピングモーターは、滑らかな動作や安定した回転が求められる装置で候補に挙がります。産業機器、ロボティクス、自動化装置などで使われることがあります。
5相ステッピングモーター
5相ステッピングモーターは、5つの相を持つ構成で、より細かな分解能を取りやすいタイプです。滑らかな回転や高精度な位置決めが求められる場面で採用されます。
この種類のモーターには、以下のような特徴があります。
- 高精度な位置決めに対応しやすい
- 滑らかな回転を得やすい
- 高度な精度が求められる装置に適用しやすい
5相ステッピングモーターは、精密さが重視される産業用機器や医療機器などで有力になる場合があります。
リニアステッピングモーター
リニアステッピングモーターは、回転運動ではなく直線運動を得るための構成です。回転をねじやベルトで直線に変換する機構を簡略化できる場合があり、直動系の位置決めで使われます。
この種類のモーターには、以下のような特徴があります。
- 直線運動を直接得やすい
- 高精度な直線位置決めに向く
- 機構を簡素化できる場合がある
リニアステッピングモーターは、搬送装置、直動ステージ、精密位置決め装置など、直線移動が中心となる用途に適しています。
クローズドループステッピングモーター
クローズドループステッピングモーターは、エンコーダーなどのフィードバックを用いて、位置や速度を補正しながら制御するタイプです。脱調対策や安定性向上を重視する場面で採用されます。製品によってはサーボに近い制御特性を持つものもありますが、一般的なサーボモーターとそのまま同一視するのは避けたほうが安全です。
この種類のモーターには、以下のような特徴があります。
- 脱調のリスクを抑えやすい
- 高精度な位置制御に対応しやすい
- 高負荷時の安定性を高めやすい
クローズドループステッピングモーターは、精度と信頼性の両方を重視したい用途に向いています。産業用ロボットや自動化装置、医療機器などで検討されることがあります。
オープンループステッピングモーター
オープンループステッピングモーターは、フィードバックを使わず、入力パルスに基づいて駆動する方式です。ステッピングモーターの代表的な使い方のひとつで、制御のわかりやすさとコスト面のバランスを取りやすい構成です。
この種類のモーターには、以下のような特徴があります。
- 制御が比較的シンプル
- ドライバ回路を簡素にしやすい
- コストを抑えたい用途と相性がよい
オープンループステッピングモーターは、比較的シンプルな制御で十分な装置や、コストを重視するプロジェクトで広く使われます。プリンターや家庭用機器での採用例もあります。
マイクロステップステッピングモーター
マイクロステップステッピングモーターは、通常より細かいステップで駆動する方式を用いた構成です。厳密にはドライバ側の駆動方法として扱われることが多いものの、実務上はひとつの分類として紹介されることもあります。
この種類のモーターには、以下のような特徴があります。
- 細かなステップによる滑らかな動作を得やすい
- 位置決め精度を高めやすい
- 振動や騒音の低減に役立つ
マイクロステップステッピングモーターは、高精度な位置決めや滑らかな動作が求められる精密機器、医療機器、光学機器などで検討されます。
ステッピングモーターのメリット・デメリット
ステッピングモーターには、位置決めや制御のしやすさといった強みがある一方で、使い方によっては注意すべき点もあります。このセクションでは、導入時の判断材料として、代表的なメリットとデメリットを整理して解説します。
メリット
ステッピングモーターには、主に以下のメリットがあります。
高精度な位置決め
ステッピングモーターは、パルス信号に応じて一定角度ずつ動かしやすいため、位置決め用途に適したモーターです。実際の精度は機種や駆動条件、負荷条件に左右されますが、位置決めが重要な装置では大きな強みになります。
このメリットのため、ステッピングモーターは特に以下の用途に適しています。
- 3Dプリンター
- CNCマシン
細かな造形を行うため、精密な位置決めが求められる
正確な切削や彫刻が必要な工程と相性がよい
制御が簡単
ステッピングモーターは、パルス数やパルス周波数をベースに制御しやすく、比較的シンプルな構成で扱いやすいのも特長です。用途によっては高度な制御が必要になる場合もありますが、サーボ系と比べると構成を簡素化しやすいケースがあります。
このメリットのため、ステッピングモーターは特に以下の用途に適しています。
- 自動改札機
- コピー機
一定の動きを安定して繰り返す制御と相性がよい
用紙搬送やスキャンヘッド移動などで、再現性のある制御を行いやすい
コスト効率が高い
オープンループのステッピングモーターは、用途によってはエンコーダーや複雑な制御系を省略しやすく、導入コストを抑えやすいのが利点です。必要な性能が明確で、フィードバック制御を必須としない装置では、有力な選択肢になりやすいでしょう。
このメリットのため、オープンループのステッピングモーターは特に以下の用途に適しています。
- 家庭用プリンター
- 監視カメラ
コストを抑えつつ、必要な位置決め性能を確保しやすい
比較的シンプルな制御で、一定の位置決めを行いたい場面に向く
デメリット
一方で、ステッピングモーターには以下のようなデメリットもあります。
脱調(ステップロス)
ステッピングモーターは、負荷が大きすぎる場合や、急激な加減速を与えた場合に、指令パルスに追従できず脱調することがあります。とくに、高負荷・高速運転・急停止を伴う条件では注意が必要です。
このデメリットを軽減するためには、次の方法が有効です。
- クローズドループ制御
- 適切な加速・減速プロファイル
フィードバックを用いて位置ずれを補正しやすくする
急激な速度変化を避け、無理のない運転条件にする
振動と騒音
ステッピングモーターは、ステップ動作に起因して、低速域や共振しやすい条件で振動や騒音が出やすい傾向があります。装置構造との組み合わせによっては、想定以上に音や振れが気になることもあります。
このデメリットを軽減するためには、次の方法が有効です。
- マイクロステップ駆動
- ダンパーの使用
ステップを細分化し、より滑らかな動作に近づける
振動を吸収し、騒音低減につなげる
発熱のしやすさ
ステッピングモーターは、停止中も電流を流して保持力を確保する構成では、発熱しやすくなる場合があります。とくに保持トルクを重視する使い方では、温度管理が重要です。
このデメリットを軽減するためには、次の方法が有効です。
- 電流制御ドライバの使用
- 適切な冷却システム
必要な電流を適切に制御し、過剰な発熱を抑える
ヒートシンクやファンを使用して温度上昇を管理し、過熱を防ぐ
8つの比較ポイント | ステッピングモーターの選び方
ステッピングモーターを選ぶ際は、主に以下の8つのポイントを確認します。
ただし、これらは単独で優劣が決まるものではありません。用途、負荷、必要精度、駆動回路との組み合わせで評価が変わるため、全体のバランスを見ながら判断することが重要です。
ステップ角
ステップ角とは、ステッピングモーターが1ステップで回転する角度を指します。ステップ角が大きいと1ステップあたりの移動量が大きくなるため、比較的シンプルな制御に向きやすくなります。一方、ステップ角が小さい場合は、より細かな位置決めに対応しやすくなります。
ステップ角が大きいことのメリットは以下の通りです。
- 制御が比較的簡単
- コストを抑えやすい場合がある
- 用途によっては高速回転に向きやすい
ステップ角が大きいモーターは、精度よりも回転数や制御の簡便さを重視する用途で検討されることがあります。たとえば、補助駆動部や比較的シンプルな回転制御を行う装置などが該当します。
一方で、ステップ角が小さいことのメリットは以下の通りです。
- 高精度な位置決めに対応しやすい
- 動作が滑らかになりやすい
- 振動を抑えやすい
ステップ角が小さいモーターは、精密な位置決めや滑らかな動作が求められる用途に適しています。例としては、3Dプリンターや精密加工機械などがあります。
トルク
トルクとは、ステッピングモーターが回転運動を行う際に発生する力を指します。必要トルクに対してどれだけ余裕があるかは、安定動作や脱調防止の観点でも重要です。ただし、高トルクであれば常によいとは限らず、装置サイズや消費電力とのバランスも見なければなりません。
トルクが高いことのメリットは以下の通りです。
- 高負荷の動作に対応しやすい
- 力強い回転力を確保しやすい
- 重い装置や負荷変動のある場面で安定しやすい
トルクが高いモーターは、産業用ロボットや重機械の駆動など、重い負荷を扱うアプリケーションに適しています。
一方で、トルクが低いことのメリットは以下の通りです。
- 消費電力を抑えやすい
- 発熱を抑えやすい
- 軽量でコンパクトな設計と組み合わせやすい
トルクが低いモーターは、精密機器や軽負荷の機器、たとえば小型プリンターや計測機器などで使われることがあります。
回転速度
回転速度とは、ステッピングモーターが一定時間内に回転する速度を指します。必要なサイクルタイムや処理能力に関わる重要な要素ですが、速度を上げるほど、トルク確保や安定性に注意が必要になる場合があります。
回転速度が速いことのメリットは以下の通りです。
- 高速動作が可能
- 生産性の向上につながりやすい
- 短時間で動作を完了しやすい
回転速度が高いモーターは、迅速な動作が求められる装置や、短時間で作業を終える必要がある用途に適しています。例としては、製造ラインやコンベアシステムなどが挙げられます。
一方で、回転速度が遅いことのメリットには以下のものが挙げられます。
- 高精度な動作に向きやすい
- 振動を抑えやすい
- 安定した運転を行いやすい
回転速度が遅いモーターは、精密な位置決めや振動を抑えた動作が必要な用途に適しています。例としては、光学機器や精密加工機械での使用があります。
保持トルク
保持トルクとは、ステッピングモーターが停止した状態で、その位置を維持するために必要なトルクを指します。停止時に外力を受ける装置では重要な指標ですが、保持力を重視しすぎると発熱や消費電力に影響することもあります。
保持トルクが高いことのメリットは以下の通りです。
- 停止時の位置保持が強固
- 外力による位置ずれを防ぎやすい
- 高精度な固定が求められる用途に向く
保持トルクが高いモーターは、外力が加わる可能性がある装置や、精密な位置保持が必要なアプリケーションに適しています。例としては、ロボットアームや自動組立機器での使用があります。
一方で、保持トルクが低いことのメリットは以下の通りです。
- 発熱を抑えやすい
- エネルギー効率を高めやすい
- 軽負荷での運転に向きやすい
保持トルクが低いモーターは、軽負荷でエネルギー効率を重視する機器に適しています。例としては、小型プリンターや低トルクのポジショニング装置などが挙げられます。
インダクタンス
インダクタンスとは、ステッピングモーターのコイルが電流変化に対して示す性質を指します。高いほど電流変化は緩やかになりやすく、低いほど応答は速くなりやすい一方で、実際の挙動は駆動条件によって変わります。
インダクタンスが高いことのメリットは以下の通りです。
- 電流の変動が比較的少ない
- 安定した動作につながりやすい
- 低速域での制御と相性がよい場合がある
インダクタンスが高いモーターは、安定した動作が求められる用途や、低速での精密な制御が必要な場面に適しています。例としては、医療機器や研究用機器での使用があります。
一方で、インダクタンスが低いことのメリットは以下の通りです。
- 応答速度が速い
- 高速動作に対応しやすい
- 精密なタイミングが必要な操作に向く場合がある
インダクタンスが低いモーターは、迅速な応答が求められる用途や、高速動作が必要な装置に適しています。例としては、産業用ロボットや高速加工機械での使用があります。
抵抗
抵抗とは、ステッピングモーター内部のコイルが電流の流れに対して示す電気的な抵抗値を指します。抵抗値は発熱や電流値、駆動回路との相性にも関わるため、単純に高い・低いだけで判断するのではなく、電源条件や設計条件とあわせて見る必要があります。
抵抗が高いことのメリットは以下の通りです。
- 条件によっては電流を抑えやすい
- ドライバや配線条件との組み合わせで扱いやすい場合がある
- システム全体の設計によって有利に働くケースがある
抵抗が高いモーターは、電源条件や駆動条件を踏まえて選定する必要があるため、単独の数値だけで判断するのではなく、システム全体との整合を見ることが重要です。
一方で、抵抗が低いことのメリットは以下の通りです。
- 電力損失を抑えやすい
- 発熱が少なく効率を高めやすい
- 低電圧動作を前提とする構成と相性がよい場合がある
抵抗が低いモーターは、効率を重視する場面や、低電圧での動作が求められる小型機器に適しています。例としては、ポータブルデバイスや省エネ設計が重要な装置などがあります。
慣性モーメント
慣性モーメントとは、回転体の回りにくさを示す指標です。値が大きいほど加速・減速には時間がかかりやすく、値が小さいほど素早い応答に向きます。ここではモーター単体だけでなく、負荷側の慣性も含めて考えることが重要です。
慣性モーメントが高いことのメリットには、以下の点が挙げられます。
- 一定条件で安定した回転を得やすい
- 急激な速度変化を抑えたい用途と相性がよい場合がある
- 装置条件によっては振動を抑えやすい
慣性モーメントが高いモーターは、安定した動作が求められる用途や、一定の速度で長時間動作する装置に適しています。例としては、精密な工作機械や自動組立ラインでの使用があります。
一方で、慣性モーメントが低いことのメリットには以下の点が挙げられます。
- 高速な加速・減速に対応しやすい
- 応答性を高めやすい
- 軽量でコンパクトな設計と組み合わせやすい
慣性モーメントが低いモーターは、高速動作や素早い応答が求められる装置に適しています。例としては、ロボティクスや高速搬送装置での使用があります。
電流定格
電流定格とは、ステッピングモーターが所定条件で安全に動作するために設定される電流値を指します。必要以上に高ければよいわけではなく、出力、発熱、ドライバ容量のバランスを見ながら選ぶ必要があります。
電流定格が高いことのメリットには、以下の点が挙げられます。
- 高出力に対応しやすい
- 高負荷での安定動作を確保しやすい
- トルク性能を確保しやすい
電流定格が高いモーターは、高負荷や高出力が必要な装置に適しており、産業用ロボットや大型機械の駆動装置として使用されます。
一方で、電流定格が低いと以下のようなメリットがあります。
- 消費電力を抑えやすい
- 発熱を抑えやすい
- エネルギー効率を重視する用途に向きやすい
電流定格が低いモーターは、省エネルギーが求められる場面や、軽負荷の機器に適しており、小型の電子機器や軽量デバイスで使用されます。
ステッピングモーターを製造・展開するメーカー5社

ステッピングモーターの比較対象になりやすいメーカーとして、以下の5社が挙げられます。
- オリエンタルモーター / ORIENTAL MOTOR
- ミネベアミツミ / MinebeaMitsumi
- ニデック / Nidec
- 三菱電機 / Mitsubishi Electric
- シナノケンシ / Shinano Kenshi
※クリックすると該当箇所まで飛びます
オリエンタルモーター(ORIENTAL MOTOR)
オリエンタルモーターは、日本の大手モーターメーカーのひとつです。モーションコントロール製品を幅広く展開しており、2相、5相、ハイブリッド型、リニアステッピングモーターなど、比較対象になりやすい製品群を扱っています。標準品の選びやすさを重視する場面でも検討しやすいメーカーです。
ミネベアミツミ(MinebeaMitsumi)
ミネベアミツミは、小型精密モーター分野で存在感のあるメーカーです。2相、5相、PM型、HB型のステッピングモーターを扱っており、小型化や精密性が求められる用途で比較対象に挙がりやすい企業です。
ニデック(Nidec)
ニデックは、幅広いモーター製品を展開する大手メーカーです。2相、5相、PM型、HB型のステッピングモーターを扱っており、産業機器をはじめ、多様な用途で選定候補になりやすいメーカーといえます。
三菱電機(Mitsubishi Electric)
三菱電機は、産業用機器やモーション制御分野で広く知られる電機メーカーです。比較検討の文脈では、ステッピングモーターや関連制御機器が候補に挙がることがあり、周辺機器との組み合わせも含めて検討されるケースがあります。
シナノケンシ(Shinano Kenshi)
シナノケンシは、モーションコントロール製品を展開するメーカーです。2相、5相、ハイブリッド型のステッピングモーターを扱っており、精度や制御性が求められる装置で比較対象になりやすい企業です。
この記事を読んで、ステッピングモーターが気になった方は、以下のボタンよりお気軽にお問い合わせください。
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
ステッピングモーターの製品はまだありません。