水中ドローンとは? 2種類の水中ロボットとの関係、活用事例や選び方、おすすめ企業をご紹介
水中ドローンとは、潜航が可能な有線式の小型水中ロボット(無人潜水機)の通称です。
操縦者は船上や陸上から遠隔操作により機体の操縦を行い、リアルタイムの水中映像を見ることができます。水中ドローンは、潜水士の目や手の代わりになり、水中の対象物の撮影や採取、点検や作業などに活用され、海洋資源の有効活用や海洋保全、インフラのメンテナンスなど、さまざまな分野での需要が高まっています。
今回の記事では水中ドローンとは何か、その種類と活用事例、正しい水中ドローンの選び方とおすすめのメーカーをご紹介します。

2008年に東京大学大学院工学系研究科博士課程を修了後、東京大学生産技術研究所助教を経て、2010年より現職。「海に光を、ロボットに冒険を」をモットーに、AUVをはじめとする新たな海中探査プラットフォームの研究開発に従事。
NPO法人日本水中ロボネットの理事として、水中ロボット競技会の運営にも取り組んでいる。2023年より内閣府政策統括官(経済安全保障担当)付政策参与を兼務。
※本件の監修にあたり、特定の企業を推薦するものではありません。

水中ドローン全製品(13件)
 タイル形式
タイル形式 リスト形式
リスト形式
1-12 / 13件
- 1
- 2









| 製品 | 詳細情報 |
|---|---|
|
🏆注目
13人が閲覧しました
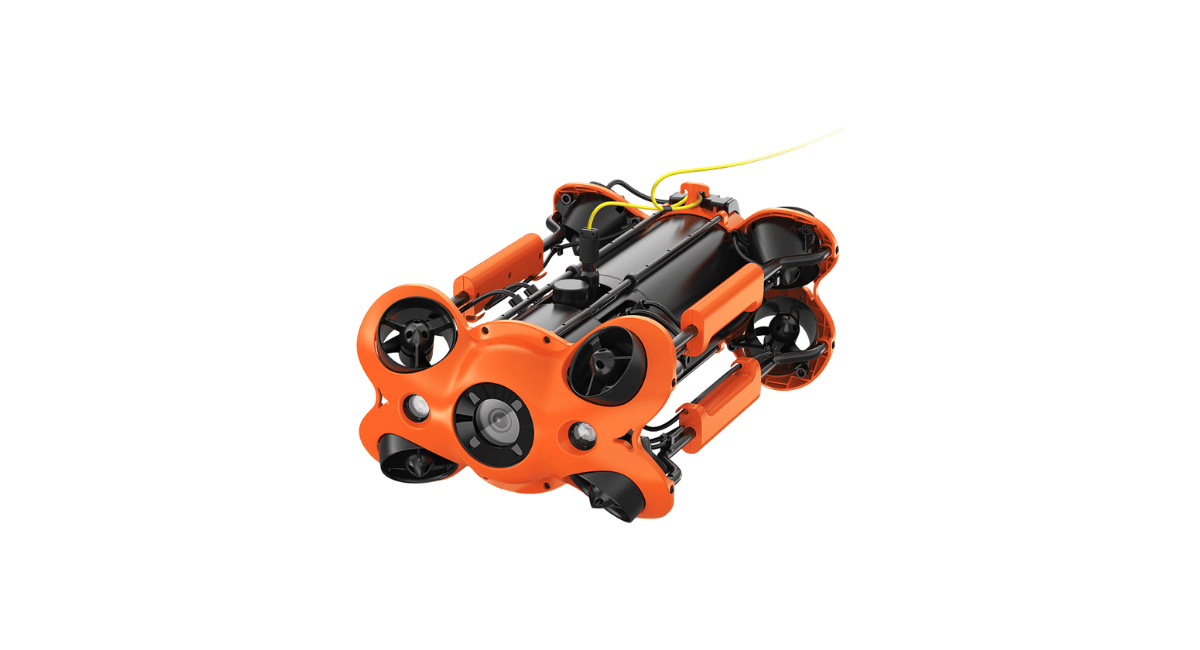
メーカー / 代理店:CHASING / シー・エフ・デー販売株式会社特徴:よりパワフルなモーター、より多彩なマウント、ハイブリッド給電に対応:CHASING M2 PROは、CHASING M2のアップグレード版で、プロフェッショナルや産業用途向けに設計された軽工業用水中ロボット。バッテリーとAC給電(オプション)のハイブリッド給電に対応。よりパワフルなモーターで、多彩なマウントが可能に 8基のスラスター搭載による全方向に360度移動:CHASING M2 PROは、8基のスラスターを搭載するフルベクトルレイアウトで、360度全方位に移動可能。ワンタッチで任意の姿勢で正確なホバリングが可能なため、狙った視点で撮影・観察することができる 強力なパワーの砂巻込み防止モーターと4ノットのアンチフロー機能:砂巻込み防止モーターは150Wで、CHASING M2のモーターに比べて50%パワーアップ。また、全方向に対し4ノット(2m/s)の水の流れに耐えるアンチフロー機能を搭載 最大潜航深度150メートル―より深く、より多くの発券のために:CHASING M2 PROの防水レベルは150mにパワーアップ。より深く水中を探索できるように 4K EIS手ぶれ補正カメラで、より鮮明な画質を実現:4K/12Mピクセルカメラ、1/2.3 SONY CMOS、EIS手ぶれ補正機能を内蔵。4000ルーメンのLEDライトを搭載したCHASING M2 PROのカメラは、水中でも細部まで鮮明に撮影することができる |
|
|
🏆注目
14人が閲覧しました
カタログあり 特徴:水中ドローンを再定義する、次世代モデル:新型スラスターによる水中での繊細な操作性、360度動ける自由度。4K、水中視野146°、最短撮影距離10cmの高性能カメラと10000ルーメンのLEDライトで、鮮明で美しい映像を撮影可能。デュアルバッテリー交換システムを搭載した高機動力産業用水中ドローン 水中ドローンのコアをガッシリ守る高耐久 一体成型 アルミニウム合金タンク:FIFISH E-GOのブレーンである精密機械を擁するコアタンクは、60μmの硬質アルマイト処理を施した耐圧性、耐腐食性、耐結晶性に優れた一体成型のアルミニウム合金素材でできており、高い耐久性で水中ドローンを守る 簡単分解で掃除やメンテのしやすいモジュール設計:モーター、カメラ、LEDライト、バッテリーの各モジュールは付け外ししやすいモジュール設計となっており、使用後の掃除やメンテナンスが今まで以上に容易になって、扱いやすい 流体力学を応用したボディで操作性アップ:水中での卓越した運動性能を誇るハンマーヘッドシャーク(シュモクザメ)をインスピレーションに設計したボディは、流体力学を取り入れた流線型。推進や細かな操作など、水中ドローンの性能をより高く発揮 |
|
|
🏆注目
14人が閲覧しました
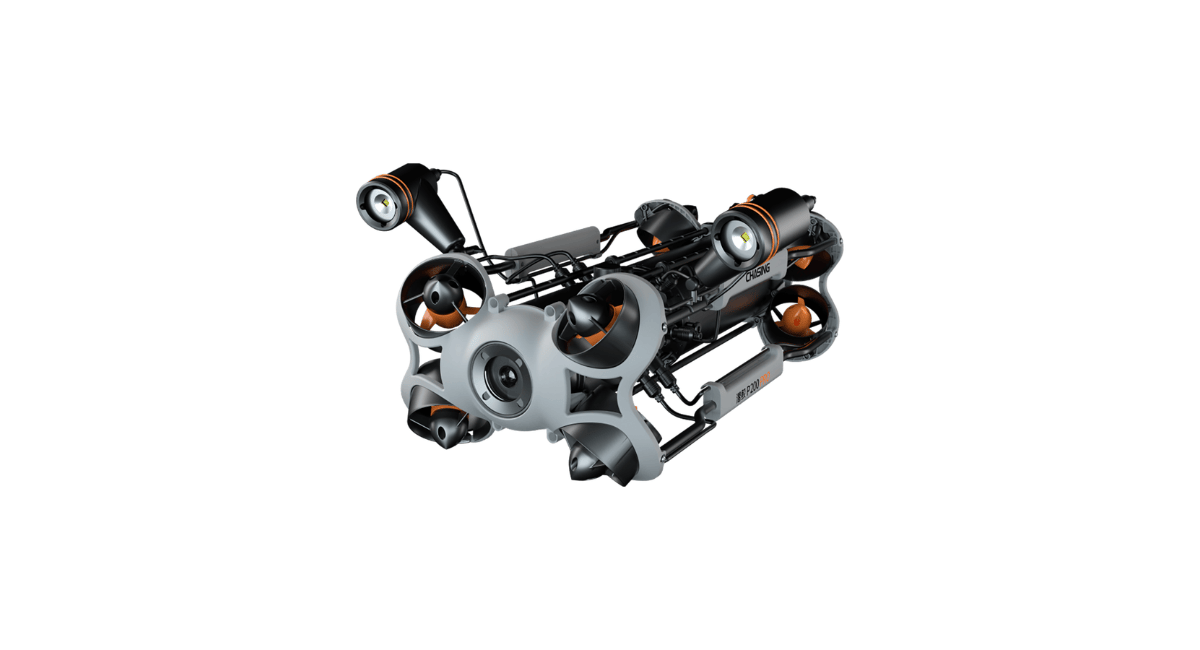
メーカー / 代理店:CHASING / シー・エフ・デー販売株式会社特徴:アクセサリーの着脱を素早く、簡単に行える『スライドイン』システム:CHASING M2 PRO MAXは、法人や行政向けに設計された産業グレードの水中ドローン。アクセサリーの取り付け部にスライドインシステムを採用。アクセサリーがスライドさせるだけで取り付けられるようになり、取り付けや取り外しが簡単に 24時間365日の稼働をサポートする『ショアベース電源システム』:CHASING ショアベース電源システム(C-SPSS)を使えば、地上からの電源供給が可能に。出力電源は1500Wになり、水中ドローンを止めることなく、フルパワーで継続動作できるようになる ※ショアベース電源システムはオプション 新世代デザインのLEDライト:4000ルーメン×2のLEDライトは、150°の広いビーム角度で水中を照らすことが可能。また、ライトアームを折りたたむことで、プランクトンなどによる反射問題を軽減することができる。光の明るさは0~100%の中で無段階調整が可能となっており、繊細な調整で細部を照らすことが可能 強力なパワーと信頼性を備えた第2世代アンチスタックモーター:第2世代のアンチスタックモーター(C-MOTOR 2.0)は出力が30%アップ。さらに固着防止性能が強化され、モーターの掃除もより簡単に行えるように より自然な色彩で撮影が可能な4K+EISカメラ搭載:CHASINF M2 PRO MAX搭載のカメラは、最大4Kビデオ/12メガピクセル写真撮影に対応。1/2.3 SONY COMSおよびEIS機能を搭載しており、水中の細部を鮮明に捉え、自然な色合いでの撮影を可能に |
|
|
15人が閲覧しました
カタログあり 特徴:すべての美しい海のために:QYSEAの新しい水中ドローン「FIFISH V-EVO」は、4K&秒間60フレーム(60fps)撮影に対応し、水中の激しい動きのあるシーンでもコマ落ちのない自然な滑らかさと色彩を、高精細・高画質に記録 4K 60fpsワンランク上の撮影体験:FIFISH V-EVOは、4Kの高解像度と秒間60フレームの高フレームレートを両立。超高画質の撮影をお手軽に実現可能 166°広視野角カメラ:166°という非常に広い視野角によるインパクトのある映像表現が可能 水中の映像色をクリアに補正するAIアルゴリズム:QYSEA独自のAI技術を駆使し、水中映像独特の青みがかった色合いを補正することができる。また、映像の彩度や明度を調整することで、より鮮やかで美しい色合いを表現することが可能 ノイズ除去AI:AI学習アルゴリズムを利用し、浮遊物やプランクトン・濁りなどをAIで認識させ、映像から取り除くことができる。映像からノイズを除去することで、被写体をより際立たせることが可能 |
|
|
15人が閲覧しました
メーカー / 代理店:QYSEA / シー・エフ・デー販売株式会社特徴:プロフェッショナル向け水中ドローン:FIFISH V6 EXPERTはプロフェッショナル向け水中ドローン。多機能で拡張性の高い水中作業ツールとして、安全かつ効率的な水中作業を実現。さまざまな拡張インターフェースを用いることで、あらゆるシーンに対応。専門性の高いオプションパーツを自由に組み合わせることで水中作業を効率的に行うことが可能 VRヘッドトラッキング:付属のVRゴーグルを使用することで、頭の動きだけで機体の動きをコントロールできるようになる。VRゴーグルは製品に付属しているため、すぐに使用可能(VRゴーグルはスマートフォンを入れて使うタイプ) 166°超広角4Kレンズ&AIによる画像調整:166°超広角4Kレンズを搭載し、撮影の難しい水中環境でも4K UHD映像や写真を1200万画素の画質でキャプチャが可能。またAIによる画像鮮明化プログラミングにより、水中本来の色彩を再現 6000ルーメンのLEDライトを搭載:強力な6000ルーメンのLEDライトにより、さまざまな状況下での水中撮影を強力にサポート。さらにAIによる画像鮮明化プログラムにより、水中でも本来の色を再現。H.265/HEVCおよびDNG(RAW)データにも対応 micro SDカードが取り外し可能:記録メディアは取り外し可能なmicro SDカードのため、空き容量が少なくなった際もすぐに交換が可能。128GBを標準搭載しており、512GBまで対応 |
|
|
15人が閲覧しました
メーカー / 代理店:CHASING / シー・エフ・デー販売株式会社特徴:誰もが手軽に始められる水中ドローン:GLADIUS MINIは5基のスラスターを搭載した水中ドローン。水中の様子は映像を記録するだけでなく、デバイスにリアルタイム配信もできる 優れた携行性:バックパックで一式を持ち運ぶことができる。どのような環境でも持ち運びがカンタン、反射ステッチで夜間でも安心、重量は約2.5kg 仰俯角 ±45° チルトロックモード:最大仰俯角±45°の幅で傾き(チルト)を任意に設定し、潜航と浮上が可能 大画面で共有:リアルタイムの映像を、ワイヤレス受信機からTVに出力することができる 水深ロックモード:リモコンをワンタッチで水深ロックモードに移行が可能。水深ロックモードでは、GLADIUS MINIを同じ水深でホバリングさせることが可能 |
|
|
16人が閲覧しました
メーカー / 代理店:QYSEA / シー・エフ・デー販売株式会社特徴:距離ロックソナー:FIFISH V6 PLUSは距離ロックソナーを搭載しており、水中ドローンと目標物との距離を固定することができる。自動的に距離を保ちながら撮影が可能になり、ターゲットとの距離も算出可能 高性能レーザースケーラー:FIFISH V6 PLUSは、レーザースケーラーを標準搭載。QYSEA独自の人工知能ビジョンアルゴリズムによって、ターゲットのサイズを自動的に算出 産業用途仕様のモーターシステム:オリジナルのQ-MOTORシステムによって、バッテリー消耗は従来品と比べて40%も低減。特殊加工したアルミニウム合金素材により、過酷な現場でも安心して使える 6000ルーメンのLED:強力な6000ルーメンのLEDライトにより、さまざまな状況下での水中撮影をサポート。さらにAIによる画像鮮明化プログラムにより、水中でも本来の色を再現。H.265/HEVCおよびDNG(RAW)データにも対応 micro SDカード:記録メディアは取り外し可能なmicro SDカード。データがいっぱいになってもすぐに交換が可能。最大容量512GB micro SDカードまで対応 |
|
|
16人が閲覧しました
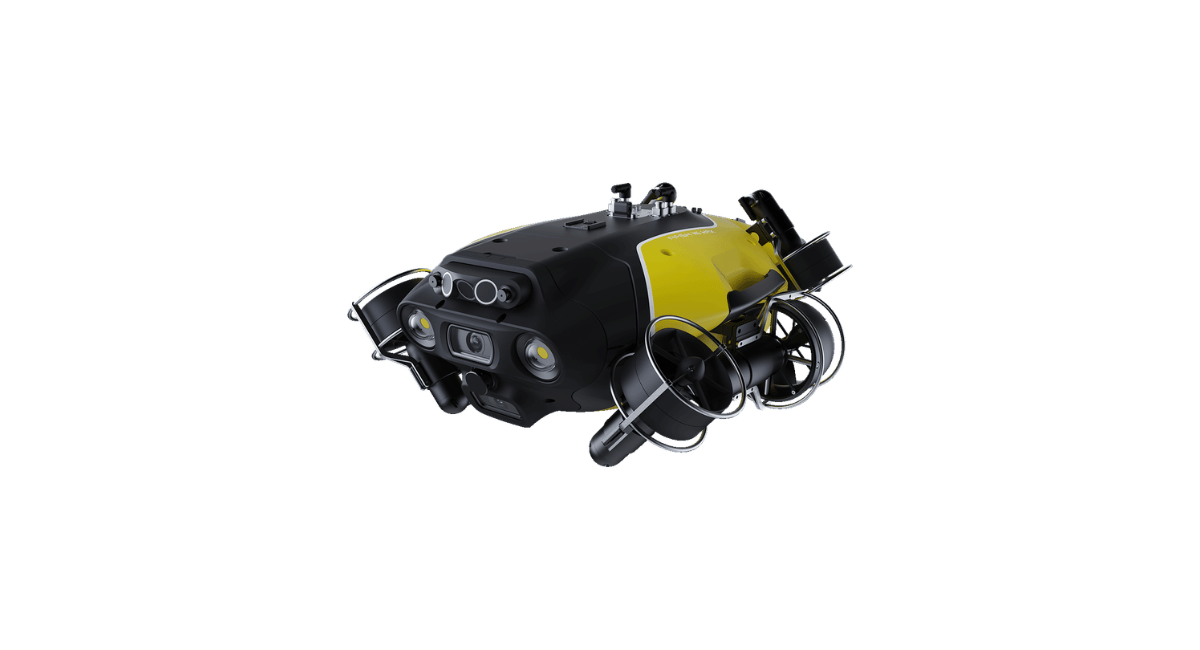
メーカー / 代理店:QYSEA / シー・エフ・デー販売株式会社特徴:Dual 4K Camera 視野を広く さらに広く:W6のDual 4K Cameraシステムは、上下広い視野を提供することができ、前方カメラ作業すると同時に下のカメラを通して移動する場所を特定したりすることでターゲットの全貌把握がしやすく、作業効率化につながる 高精度の測量ツール:ARスケーラー(オプション)はQYSEA独自の人工ビジョンアルゴリズムによって、ターゲットのサイズを自動的に算出。レーザースケーラーはレーザービームを搭載し、レーザービームの間の距離は10cmで、10cm参照点として測量可能。測量アーム(オプション)はアームに分度器と定規を記載し、潜水士の測量と同じように、傷や割れ目などを測量できるようになる 350M潜行可能産業水中ドローン:最大潜行深度350M、今までない稼働力と可動範囲を駆使し、あらゆる海域とシチュエーションで活躍可能 交換可能バッテリー:高速充電可能なインテリジェントバッテリーを使用し、標準搭載388whバッテリーを1時間充電で70%充電可能 |
|
|
16人が閲覧しました
メーカー / 代理店:CHASING / シー・エフ・デー販売株式会社特徴:水中の探索をお手軽に:DORYのWi-Fiブイは、最大15メートル離れたモバイルデバイスにワイヤレスで接続が可能。さらにドローンとブイの間に15メートルの有線テザーがあるため、幅広い範囲を自由に探索できる 超コンパクトボディ:手のひらに乗るコンパクトボディで、海中探索が可能。DORYはGLADIUS MINIに比べて重さは1/2、サイズは65%もコンパクトに。あなたのバッグに入れて、使いたい場所に手軽に持ち運ぶことができる 45度のチルトロックが可能:45度のチルトロックにより、海底を眺めたり、上部のクリスタルウォーターを覗き込むことが可能 デプスロック機能:デプスロック機能を使用することで、深度の固定が可能 GPS WiFiブイによる高精度位置調整:DORYに接続するGPS WiFiブイによって位置を正確に測定できる。Anti-lost Warningを使用すると、WiFi接続が切断される前に調整することが可能 |
|
|
17人が閲覧しました
メーカー / 代理店:CHASING / シー・エフ・デー販売株式会社特徴:柔軟かつ安定した姿勢制御が可能なC-Senseコントロールシステム:CHASING M2Sは、インテリジェント航行制御システムと画像アルゴリズムを備えた産業用グレードの水中ドローン。優れた姿勢制御と撮影機能で水中を自由に動き、さまざまなシーンの撮影が可能 NeptuneX インテリジェント航行制御システム:独自のナビゲーションアルゴリズムにより、海流により干渉を受ける場合もスラスターの方向を自動制御し、安定した航行が可能。また、水中ドローンに対し、てんめんや底面に向かう海流に対しても姿勢制御を行い、目標から目を離さない 8つのスラスターによる機体制御とプロペラを保護するバタフライウィング:CHASING M2Sは、8つのスラスターにより高い姿勢制御と優れた安定性を発揮。また、流線型のエレガントなデザインのバタフライウィングによりプロペラを保護 Apex アンチスタック Cモーター3.0:CHASING M2Sに採用されている、第3世代のApexアンチスタックCモーター3.0は、独自のソリューションと保護技術により、モーターの摩擦による腐食や錆を軽減し、安心して使用可能 優れた気密性:メインキャビンの防水構造や照明を全面的に刷新し、水中での作業安定性をさらに向上 |
|
|
18人が閲覧しました
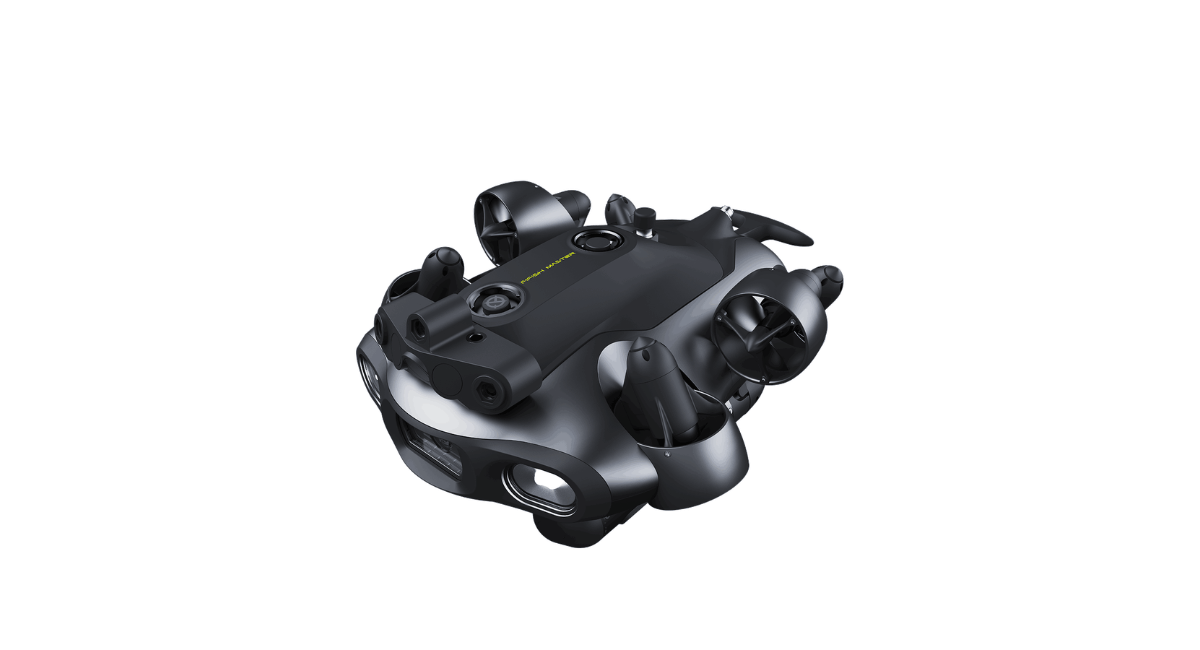
メーカー / 代理店:QYSEA / シー・エフ・デー販売株式会社特徴:最新型水中ドローン:FIFISH E-MASTERは、複雑な水中環境での高精度な測定、検査、調査を可能にする最新型水中ドローン。特に下水管や水路の点検において、その性能を最大限に発揮 Q-DVL ステーションロック:FIFISH E-MASTERは、Q-DVLホバリングシステムを標準搭載しており、水中でドローンの位置をロックし、水中作業環境からの干渉に対して正確にホバリングが可能。非常に安定しており、滑らかで精密な検査を実行し、提供 U-INS水中自動ナビゲーション:QYSEA水中測位システムU-QPS2は、ソフトウェアおよびハードウェアのエコシステムであり、FIFISH ROVのリアルタイム位置の自動航行、POIレコーディング、自動帰航、ルート計画を提供。また追加オプション搭載で、高精度RTK測量など、さまざまな水中測位ソリューションを提案 QY-MT|AI測定ツール リアルタイム簡単測量&専用測量ソフト:FIFISH E-MASTERは、AR測量機能を標準搭載しており、拡張現実技術(AR)とレーザースケーリング技術を活用して、水中の物体のサイズを高精度かつ簡単に測定。リアルタイムで測量物体を測量し、保存することで、効率よくさまざまな産業レベルの検査タスクに対応 QY-BT|FIFISHインテリジェント推進測定ツール 2D&3D海底マッピング:FIFISH E-MASTERにはQY-BT(水深測定ツール)が搭載。FIFISHが開発したインテリジェント水深測定アルゴリズムとQ-DVL、GPSを基に、自動航行が可能となり、高精度の水中測位と3Dマッピングが実現 |
|
|
18人が閲覧しました
メーカー / 代理店:QYSEA / シー・エフ・デー販売株式会社特徴:水中非破壊検査の新時代へ:FIFISH W6 MAXは、4.5ノットの走行性能で、強潮流下でも安定して作業でき、強い推進力で、15kgの高ペイロードが可能。各種非破壊検査(NDT)ツールに対応し、航法・測位・計測・マッピングのスマート機能を搭載 強力推進・柔軟に現場対応:リデザインした産業用スラスターにより、最大4.5ノットの前進速度を実現。パワフルかつ効率的な水中オペレーションを可能にし、強流下でも安定した操作性を提供 独自のソナーシステム:自社開発の前方・下方DVLとAIアルゴリズムの連携により、全方位での定点保持と前方・下方の衝突回避を実現。構造物が密集する複雑な環境でも安定した稼働が可能 15kgペイロード:FIFISH W6 MAXは、最大15kgの有効ペイロードと4個外部Qポートにより、多彩なオプションを搭載可能 オプションは5分で素早く交換:最新モーターシステムと制御アルゴリズムを連動させることで、高負荷のオプションを装備しても安定した姿勢制御を実演。複雑な検査作業においても高効率で柔軟に対応 |
1-12 / 13件
- 1
- 2
水中ドローンのカタログ(3件)
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
水中ドローンの基礎知識や導入のポイントについては、以下の解説をご覧ください。
水中ドローンとは、潜航が可能な有線式の小型水中ロボット(無人潜水機)の通称です。
操縦者は船上や陸上から遠隔操作により機体の操縦を行い、リアルタイムの水中映像を見ることができます。水中ドローンは、潜水士の目や手の代わりになり、水中の対象物の撮影や採取、点検や作業などに活用され、海洋資源の有効活用や海洋保全、インフラのメンテナンスなど、さまざまな分野での需要が高まっています。
今回の記事では水中ドローンとは何か、その種類と活用事例、正しい水中ドローンの選び方とおすすめのメーカーをご紹介します。
※JET-Roboticsの問い合わせフォームに遷移します。
※一部メーカーとは提携がない場合がありますが、ユーザー様に最適なご案内ができるよう努めています。
2008年に東京大学大学院工学系研究科博士課程を修了後、東京大学生産技術研究所助教を経て、2010年より現職。「海に光を、ロボットに冒険を」をモットーに、AUVをはじめとする新たな海中探査プラットフォームの研究開発に従事。
NPO法人日本水中ロボネットの理事として、水中ロボット競技会の運営にも取り組んでいる。2023年より内閣府政策統括官(経済安全保障担当)付政策参与を兼務。
※本件の監修にあたり、特定の企業を推薦するものではありません。
目次
最近の更新内容
2026/7/13更新 企業情報の更新(シー・エフ・デー販売)
水中ドローンとは
水中ドローンとは、潜航が可能な有線式の小型水中ロボット(無人潜水機)の通称です。水中ドローンの機体は、以下のような部品から構成されています。
- 制御装置
- ジャイロコンパス
- 圧力センサー
- スラスター
- カメラ
- ライト
- テザーケーブル
操縦者の指示を受けてスラスターやセンサーを動かすコンピュータ。(空中)ドローン向けのフライトコントローラーが採用されることが多い
機体の姿勢や方位、角速度を計測するセンサー
水圧を計測するセンサー。水圧は深度に比例するので、機体の深度を求めることができる
機体を水中で移動させるための推進器。モーターとプロペラを組み合わせたもの
水中の映像を撮影するためのカメラ
水中の暗い場所で撮影するためのライト
機体とコントローラーを物理的に接続するためのケーブル
水中ドローンには、オプション機器として、ロボットアームやソナー、レーザースケーラー、ドップラー式対地速度計(DVL)などがあり、これらは、水中の物体の掴みや採取、障害物や地形の確認、物体のサイズの測定、機体の安定化などに役立ちます。
2種類の水中ロボットと水中ドローンの関係
水中ドローンがどのようなものなのかは、水中ロボットとの関係を知ると深く理解することができます。水中ロボット(無人潜水機)には、以下の2種類があります。
- ROV(Remotely Operated Vehicle)
- AUV(Autonomous Underwater Vehicle)
ROV(Remotely Operated Vehicle)
ROVは、陸上や船上から遠隔操作によって水中で動かす水中ロボットです。
水中カメラやライト、ソナー、マニピュレータなどを搭載して、水中の撮影や観測、作業などに使われることが多いです。水中ドローンは小型のROVの通称です。
このタイプは給電式とバッテリー式があり、給電式はテザーケーブルを介して電力を送るためパワフルな作業や長時間の連続稼働が可能である反面、テザーケーブルの長さの制限や、ケーブルが太くなるため海流の影響を受けやすいという欠点もあります。
バッテリー式は電力を送る必要がないためテザーケーブルを長く細くでき、機動性が高いのが利点です。電力の制限があるためパワフルな作業や長時間の作業には向きませんが、近年のバッテリー技術の進化に伴い、海洋開発や環境保護、災害対策、海洋研究など、さまざまな分野で活用されています。
ROVの強みは、以下のとおりです。
ROVの強み
- 潜水士に比べて安全性が高く、コスト削減や作業効率を向上
- リアルタイムで水中の映像や情報を得ることができ、記録や分析にも活用可能
- 様々なオプション機器を搭載することで、水中での作業の幅を広げられる
一方、ROVを使用する際は以下の点に注意する必要があります。
ROVの注意点
- ケーブルに繋がっているため、最大深度や稼働範囲に制限がある
- 水中の環境や潮流に影響されやすく、操作が難しい
- 母船の動きが拘束される
- ケーブルが水中で引っかかるとリカバリーが難しい
水中の様子をリアルタイムで見ながら、撮影や観測、作業などを行う場合に適しています。
AUV(Autonomous Underwater Vehicle)
AUVは、機器本体が自律的に状況を判断して、全自動で水中を航行する水中ロボットです。
搭載する観測機器(マルチビーム音響測深機、サイドスキャンソナーなどのソナーやカメラ、水質センサーなど)によって、海底地形や地質、海洋環境や生態などを観測できます。
テザーケーブルを必要としないため、バッテリー式ROVよりもさらに機動性が高く、ケーブルの長さに活動距離を制限されることもありません。しかし、バッテリー式なので稼働時間が限られる点には注意が必要です。
また、水中では安定した高速無線通信手段がないため、トラブル発生時も操縦者が介入することができず、複雑な環境への対応には限界があります。このため地形探査や水質調査、比較的平坦な海底の画像観測など、単純な作業に向いています。
海洋開発や環境保護、災害対策、海洋研究など、さまざまな分野での活用が期待されています。
AUVの強みは、以下のとおりです。
AUVの強み
- 潜水士に比べて安全性が高く、コスト削減や作業効率の向上に貢献
- ROVに比べて水深や潮流、波浪などによる影響が少なく、広範囲の安定した観測が可能
- 事前に設定したコースやタスクに従って自律的に水中を航行可能
- 母船が拘束されない(他の作業を並行して行うことも可能)
一方で、AUVを活用する際は以下の点に注意する必要があります。
AUVの注意点
- 内部バッテリーのみで潜航するため、稼働時間や航続距離に制限がある
- 水中での状況変化や故障に対して、対応能力が限定的
- トラブルの際に機体を失う可能性がROVより高い
- 観測結果をリアルタイムに確認することができない
水中の環境や地形の観測や探査などを行う場合に適しています。
以上をまとめると、ROV(Remotely Operated Vehicle)とAUV(Autonomous Underwater
Vehicle)は、いずれも水中ロボットに分類されますが、違いもあります。ROVはテザーケーブルのついた状態で遠隔操作し、観測結果をリアルタイムに確認できるほか、試料採集などの作業も行えます。一方、AUVはテザーケーブル無しで全自動で行動し、ケーブルに依存せず広範囲の探査や観測を行えます。比較的単純なものの広域をカバーする必要のある観測や、定期的に行う観測に向いています。水中ドローンは小型ROVの通称です。
| ROV (Remotely Operated Vehicle) |
AUV (Autonomous Underwater Vehicle) |
水中ドローン (小型のROV) |
|
|---|---|---|---|
| 操作方法 | テザーケーブルを使用した 遠隔操作 |
自律型、ケーブルに 依存しない |
テザーケーブルを使用した 遠隔操作 |
| リアルタイム制御 | 〇 | △ (音響通信などのみ) |
〇 |
| 用途 | 水中での観測や作業 (リアルタイムでの映像やデータ収集) |
広範囲の観測 (広い範囲でのデータ収集) |
水中での観測や作業 (小規模での使用) |
※スマートフォンは横にスクロールできます。
ここまで、水中ロボットと水中ドローンの関係について紹介しました。次のセクションでは、その水中ドローンが具体的にどのような場面で活躍しているのかを紹介します。
水中ドローンの活用例

水中ドローンは、以下のような場面で活用されることが多いです。
- 水中カメラ撮影
- 水中測量
水中カメラ撮影
水中ドローンは、水中カメラ撮影で活用されることが多いです。
その理由には、以下の点が挙げられます。
- 高画質や広角のカメラが多く使われ、水中の映像や情報を得ることができ、記録や分析にも活用可能
- 様々なオプション機器を搭載することで、水中での作業の幅を広げられる
ただし、水中ドローンはケーブルに繋がっており、稼働範囲に制限があります。また、水中の環境や潮流に影響されやすく、操作が難しい場合があることに注意が必要です。
水中測量
水中ドローンは、水中測量でも活躍します。
水中測量は海底の地形や水中構造物の形状や位置などを調査する作業であり、そのデータは科学研究や環境保護、インフラの保守点検など多岐にわたる分野で利用されます。水中ドローンは、危険な環境やアクセス困難な場所での測量を安全かつ効率的に行うために、人間の潜水士に代わって使用されます。
水中ドローンを活用するメリット・注意点

水中ドローンは水中で大いに活躍しますが、導入する上で検討しておくべき注意点もあります。それぞれ、順番にご紹介します。
メリット
水中ドローンには、以下の強みがあります。
※クリックすると該当箇所まで飛びます
安全に使用できる
水中ドローンの最大の強みの一つは、人間の潜水士に代わって危険な環境や過酷な条件下で作業を行えることです。これにより、潜水士が直面する可能性のある危険や健康リスクを軽減し、水中での安全性を大幅に向上させることができます。
深海探査や沈没船の観測、環境モニタリングなど、人間には過酷すぎる環境での作業が可能となります。また、連続的な監視や長時間の観測が必要な場合にも、水中ドローンを使用することで、持続的でコスト効率の良い方法でこれらの作業を実行可能です。さらに、リアルタイムでのデータ収集と送信により、迅速な意思決定が可能となり、プロジェクトの効率性が向上します。
コスパが良い
水中ドローンは大型のROVやAUVより大幅に低コストで導入でき、コスパが良いです。給電式やバッテリー交換可能な機種を使えば長時間の作業にも対応できるため、効率的な資源使用が可能です。
また、潜水士を使う際に必要となる安全と健康に関わるコスト、例えば潜水病治療や高度な訓練にかかる費用を削減できます。また、一度に長時間の監視や観測が可能であるため、プロジェクトの時間効率が向上し、結果的に全体のプロジェクトコストが低減します。
小型で軽量であり、運用が容易
水中ドローンは小型かつ軽量であるため、携帯性と柔軟性が高いです。そのため手軽に運搬でき、投入や回収が容易です。また、狭いスペースや複雑な地形においても活動可能です。
この強みがもたらすメリットは多岐にわたります。一つは、遠隔地やアクセスが困難な場所への迅速な展開が可能になることです。これにより、緊急時の対応が速やかに行え、例えば油漏れ事故の初期評価などに活用できます。
また、一般的な乗り物で運搬できるため、クレーンなどの特別な運搬手段や高額な輸送コストが不要となります。さらに、使用の手軽さから、頻繁にかつ多様な環境での使用が促進され、より広範囲のデータ収集が実現し、科学調査や環境モニタリングの有効性が向上します。
注意点
一方で、水中ドローンを導入する上で以下の3つに注意する必要があります。
※クリックすると該当箇所まで飛びます
最大深度や可動範囲に制限がある
水中ドローンは最大深度や可動範囲に制限があります。
これは、ドローンが到達できる水深が制限されており、また、テザーケーブルの長さによってその運動範囲が決まるためです。これにより、非常に深い水域や広大な範囲を観測する場合、ドローンの使用が困難または不可能になることがあります。
このデメリットを回避するためには、いくつかの対策が考えられます。まず、より深い水域への対応が可能なモデルへの投資が挙げられます。こうした水中ドローンは高圧に耐えられる設計と強化された材料で作られています。
また、バッテリー式とすることで長いテザーケーブルを採用することができます。超音波や可視光による高速無線通信の技術開発も進められていますので、将来的にはテザーケーブルをなくすことができるかもしれません。
- バッテリー式のモデルを選ぶこと
- 深い水域への対応が可能なモデルを選ぶこと
- 流れの影響を受けにくいような機体形状のモデルを選ぶこと
操作が難しい場合がある
3次元空間を動くため制御システムが複雑であることが多く、操作が難しいことがあります。また、水中環境の不確実性、水流の影響、視界の制限などが操作の難しさを増加させます。
このデメリットを回避するためには、以下の対策が有効です。
- 水中ドローン導入時に直感的で理解しやすい操作システムのものを選ぶ
- 操作者に対する定期的な訓練プログラムを提供し、水中ドローンの操作技術と環境認識力を向上させる
- 人工知能(AI)を活用して、一部操作を自動化する
これらの対策を講じることで、水中ドローンの操作の難しさを低減し、より広範囲のユーザーにとって効果的なツールにすることが可能です。
適切なメンテナンスを行わないとすぐに劣化する
水中ドローンの機体は、使用後適切なメンテナンスを行わないとすぐに劣化してしまいます。
使用後には必ず真水中で動作させ、塩分を取り除く必要があります。また、水分を完全に乾かしてから収納することが重要です。さらに、圧力容器の開け閉めを行う際は、Oリングのグリスアップを適切に行う必要があります。これらの手順を守らないと、装置の寿命が短くなり、性能が著しく低下する可能性があります。
特に、塩分除去や乾燥は、装置の腐食を防ぐために欠かせない作業です。Oリングのグリスアップも水漏れを防ぐ重要なポイントとなります。
水漏れは故障の主要な原因となるばかりか、特に海水が漏れた場合は火災などの大きなトラブルの原因となるので、最大限の注意が必要です。
5つの比較ポイント | 水中ドローンの選び方

貴社に最適な水中ドローンを選定するには、以下の5点を検討しておく必要があります。
※クリックすると該当箇所まで飛びます
機体のサイズ
水中ドローンのサイズは、機体の搭載能力や機動性に影響します。小型で軽量な水中ドローンは、運用が容易で、狭い場所にも入りやすい一方で、出力や航続距離が不十分な場合があります。逆に、大型で重量のある水中ドローンは運用が困難で、広い場所での使用が適していますが、出力や航続距離が高いことがあります。
サイズが大きい場合のメリットは以下のとおりです。
機体サイズが大きい場合
- 機体に多くのオプション機器を搭載できるため、水中での作業の幅が広がる
- 機体の出力が高く航続距離が長いため、深海や潮流の強い環境でも安定した潜航が可能
- 機体の重量があるため、水中での安定性が高い
一方で、サイズが大きいと機体の運用が困難で、専用の船やクレーンなどが必要になる場合があります。また、機体のコストが高くなりやすく、保険やメンテナンスなどにも費用がかかります。機体の機動性が低く、狭い場所や曲がりくねった場所に入りにくいこともあるので、注意が必要です。
サイズが小さいと、以下のようなメリットがあります。
機体サイズが小さい場合
- 機体の運用が容易で、人間の手で持ち運べる場合もある
- 機体のコストが低く、保険やメンテナンスなどにも費用がかかりにくい
- 機体の機動性が高く、狭い場所や曲がりくねった場所にも入りやすい
その一方で、サイズが小さい水中ドローンはつけられるオプション機器が少ないので水中での作業の幅が狭くなったり、機体の出力の低さや航続距離の短さから深海や潮流の強い水中では潜航が困難になる場合があります。機体の重量も軽く、水中での安定性が低いので注意が必要です。
スラスターの数
水中ドローンのスラスターの数と強さは、その速力や制御性に大きく影響します。スラスターの数が多い場合、水中での姿勢制御やホバリングが容易になり、正確な位置合わせが可能ですが、電力消費が大きくなる傾向があります。一方で、スラスターの数が少ない場合は、電力消費を抑えることができますが、水中での機動性が低下することがあります。
スラスターの数が多い場合のメリットは以下の通りです。
スラスター数が多い場合
- 水中での姿勢制御やホバリングが容易で、正確な位置合わせが可能
- 波や流れの影響を受けにくく、安定した潜航が実現できる
- 機動性が高く、狭い場所や曲がりくねった場所にも入りやすい
一方で、スラスターの数が多い水中ドローンは、機体が大型化し、運用が高コストになることがあります。また、機体のコストが高くなるほか、故障リスクも上がるので、保険やメンテナンスの費用が増加します。同時に、電力消費も大きくなるため、稼働時間や航続距離に制約が生じる可能性があり、注意が必要です。
スラスターの数が少ない水中ドローンは機体を小型軽量にでき故障リスクも下げることができますが、水中での姿勢制御やホバリングが困難で正確な位置合わせが難しい上、波や流れの影響を受けやすく、潜航が不安定になることがあります。この場合、機動性が低下し、狭い場所や曲がりくねった場所にアクセスすることが困難になります。
水中カメラやライトの性能
水中ドローンのカメラとライトは、水中での映像や情報取得に重要な役割を果たします。高機能なカメラとライトは、暗い環境でも高画質や広角撮影を可能にしますが、大きなコストと電力消費が伴います。一方で、基本的なカメラとライトでは、低いコストと電力消費で運用できるものの、画質や情報量が落ちるというトレードオフがあります。
カメラやライトの性能が高い場合のメリットは、以下の通りです。
カメラやライトの性能が高い場合
- 詳細な映像や情報の取得が可能
- 暗い場所でもクリアな映像が得られる
一方で、デメリットとしては、機体の重量やバランスへの影響、高コスト、電力消費の大きさによる稼働時間の制限が挙げられます。
カメラやライトの性能が必要最低限の場合のメリットには、以下のものが挙げられます。
カメラやライトの性能が必要最低限の場合
- 機体の軽量化
- 低コスト
- 長い稼働時間と航続距離
その一方で、デメリットとしては、粗い映像や情報しか得られず、暗い場所ではほとんど情報を捉えることができないため、使用環境を選ぶ必要があります。
バッテリー容量
水中ドローンの電源の種類とその容量は、機体の稼働時間や航続距離、および全体的なパフォーマンスに大きな影響を与えます。給電式はケーブルを通じて電力を供給するため、強力なパワーを持続的に提供できますが、ケーブルの長さによる制限があります。一方、バッテリー式は内蔵バッテリーから電力を供給し、高い機動性が実現されますが、稼働時間が限られるという欠点があります。
電源の容量が大きい場合のメリットは以下の通りです。
電源容量が大きい場合
- 機体の稼働時間や航続距離が長くなり、水中での作業や探査の時間が増加
- 機体の出力や搭載能力が向上し、水中での作業や探査の幅が広がる
一方で、デメリットとしては、機体の重量やバランスに影響を与えることがあり、運用が困難になることがあります。また、機体のコストが増加し、保険やメンテナンスの費用も高くなります。さらに、大きなバッテリーは充電に時間がかかることがあります。
電源容量が小さい場合のメリットには、以下のものが挙げられます。
電源容量が小さい場合
- 機体の重量やバランスに影響しないため、運用が容易
- 機体のコストが低く抑えられ、保険やメンテナンスの費用が安くなる
- バッテリーの充電時間が短い
しかし、デメリットとしては、稼働時間や航続距離が短くなることがあり、水中での作業や探査の時間と範囲が限られます。また、機体の出力や搭載能力が低下し、深海や潮流の強い水中での潜航が困難になることがあります。
価格
水中ドローンの価格は水中ドローンの性能と強い関係があります。また、選定にあたっては調達価格だけでなく、維持費用も考慮することが重要です。
高価な水中ドローンのメリットは、深海に対応していたり、高機能なセンサーや先進的な技術を備えている点です。これにより、深い水深での作業や高解像度のイメージング、精密な測位が可能になります。さらに、堅牢な構造により過酷な環境下でも長期間にわたる運用が可能で、メーカーによる広範な技術サポートと長期保証が提供され、トラブル時のリスクが低減されます。
一方、価格が安い水中ドローンのメリットは、低コストでの導入が可能であることです。予算が限られている場合や、試験的な使用に最適で、機器の故障や性能不足による金銭的リスクも低く抑えられます。また、低価格帯の製品は選択肢が豊富で、特定のニーズに最適なモデルを見つけやすくなります。
貴社の予算に合わせた水中ドローンを選ぶには、必要な機能を明確に特定し、複数のメーカーやモデルを比較してコストパフォーマンスの高い製品を選ぶことが重要です。また、予算が限られている場合は中古品の購入や、必要な期間だけのレンタルやリースも視野に入れても良いかもしれません。
水中ドローンを製造するメーカー・代理店を紹介

水中ドローンを製造するメーカーはいくつかありますが、この記事ではJET-Roboticsおすすめのドローンのメーカー・代理店・SIerなどをご紹介します。
※JET-Roboticsの問い合わせフォームに遷移します。
※一部メーカーとは提携がない場合がありますが、ユーザー様に最適なご案内ができるよう努めています。
-
【メーカー】
- フルデプス / FullDepth
- 広和 / KOWA
- キュー・アイ / Q・I
- キューワイシー / QYSEA
- ブルー・ロボティクス / Blue Robotics
※クリックで各メーカーの詳細に飛べます。
-
【代理店】
- シー・エフ・デー販売 / CFD Sales
※クリックで各代理店の詳細に飛べます。
水中ドローンのメーカー
フルデプス / FullDepth
| 会社名 | フルデプス / FullDepth |
| 設立年 | 2014年 |
| 本社 | 茨城県つくば市1-1-1 筑波大学産学リエゾン共同研究センター棟 |
| 概要 | 産業用水中ドローン(ROV/AUV)の開発・製造・販売メーカー |
フルデプスは、深海探査に水中ドローンによる技術革新をもたらし、地球最後の秘境である深海をより身近にするために設立された筑波大学発のスタートアップ企業です。
フルデプスは 「DiveUnit300」や独自のクラウドサービスなどを提供しています。「DiveUnit300」小型ながら水深1000mの深海でも使用できます。
洋上風力発電、ダム、発電所などでの点検業務や、背負う前のアセスメントなどにも利用できるドローンを販売しています。
広和 / KOWA
| 会社名 | 広和 / KOWA |
| 設立年 | 1960年 |
| 本社 | 大阪府大阪市此花区西九条1丁目3番31号 |
| 概要 | 潤滑装置やROV、レトルト食品など幅広く事業展開している |
広和は日本の水中ドローンメーカーで、潤滑・給油装置や海洋関係事業などを手がける企業です。マリンシステム部では、1985年から水中TVカメラロボット(ROV)の開発・製造・販売を行っており、浅海から大深度の深海11,000メートルまで対応する機体を提供しています。
広和の「推進150m対応 ROV」は、47kgと軽量なため少ない人数で用意に扱えます。最大潜航水深150mは幅広い用途で利用できます。
港湾、海、川、湖はもちろん、原子力発電所、浄水場タンク内、下水処理場、貯水タンク内などの環境で利用されているモデルもあります。
キュー・アイ / Q・I
| 会社名 | キュー・アイ / Q・I |
| 設立年 | 1971年 |
| 本社 | 神奈川県横浜市金沢区福浦2-4-7 |
| 概要 | 水中、管内、耐放射線テレビカメラ・ロボット等の開発・製造・販売 ならびに輸出入 |
キュー・アイは、水中、管内、耐放射線テレビカメラ・ロボットの開発・製造・販売ならびに輸出入を行う企業です。
キュー・アイは、光ネットワーク伝送式水中テレビロボット「DELTA-200.net」のほかに、「RDQ-101」という水中ドローンを開発・販売しています。
国土交通省を始めとした官公庁や、大学、地方自治体などへの納入実績を持ちます。
| 会社名 | キューワイシー / QYSEA |
| 設立年 | 2016年 |
| 本社 | 中国広東省深圳市龍崗区坂田街道雅南路1号 ギャラクシー・インキュベーター第2期1階 |
| 概要 | 水中ロボット(ROV)FIFISHシリーズを中心に、AI、水中測定、ソナー、ロボットアームなど複合ソリューションを開発・製造・販売する企業。 |
キューワイシーは中国の企業で、法人向け、個人向けどちらの水中ドローンの開発・製造・販売も行っています。
キューワイシーは水中ドローンのブランドとして「FIFISH」シリーズを展開しており、360度全方向に移動できる水中ドローンや4K・60FPSのカメラやマルチツール統合を備えた水中ドローンなどを提供しています。
水中調査・監視を中心にして、海上・水中捜索救助の業務にも使うことができ、沈没事故のあとの回収作業などでも導入されており、広範囲の探索に貢献しています。
ブルー・ロボティクス / Blue Robotics
| 会社名 | ブルー・ロボティクス / Blue Robotics |
| 設立年 | 2014年 |
| 本社 | アメリカ合衆国カリフォルニア州トーランス市カリフォルニアストリート2740番地 |
| 概要 | 海洋ロボティクスの分野に特化した企業でロボット本体と関係パーツを提供 |
ブルー・ロボティクスは、水中ドローンの開発・製造・販売を行う企業です。「水中ドローン」の制約であるスラスター部分を探すうちに理想のものがないと感じ、スラスターをガレージで作り始めたところから始まりました。
水中ドローンのブランドとして「BlueROV2」を展開しており、6基のスラスターを搭載した高性能ながら、低価格でカスタマイズ性に優れていることが特徴です。また、水中ドローンの部品やセンサーなども提供しており、従来のROVよりも小型・低コストな機体を提供しています。
海洋探査、教育、研究開発など多岐にわたる用途で活用されています。
水中ドローンの代理店
シー・エフ・デー販売 / CFD Sales
| 会社名 | シー・エフ・デー販売 / CFD Sales |
| 設立年 | 1974年 |
| 本社 | 名古屋市中区大須三丁目30番20号 赤門通ビル |
| 概要 | メモリ・ストレージなどのPCパーツ及び周辺機器の開発、製造、販売 |
シー・エフ・デー販売は、パソコンを自作するユーザーとともに歩んできた40年以上の歴史があり、その中で培った信頼と実績で、最新テクノロジーを常に提案する会社です。PCパーツや周辺機器販売はもちろんのこと、海外ブランドの日本販売のサポートや、DJIの正規代理店として、そして水中ドローンの日本市場におけるパイオニアとして、さまざまなソリューションに合わせたドローン活用を提案します。
同社は水中ドローンとして、CHASINGの「M2 PRO MAX」や「GLADIUS MINI」、QYSEAの「FIFISH W6 MAX」などを取り扱っています。M2 PRO MAXは新世代のアクセサリー取り付け技術による簡単で高速な組み立てや取り外し、海上からの電源供給システムや新世代のLEDライトも搭載しています。GLADIUS MINIは5基のスラスターを搭載しており、映像を記録するだけでなく、デバイスにリアルタイム配信をすることが可能です。
また、FIFISH W6 MAXは4.5ノットの走行性能で、強潮流下でも安定して作業でき、強い推進力で、15kgの高ペイロードが可能な機体です。以上の水中ドローンの想定される活用シーンやシー・エフ・デー販売が扱っているそのほかの水中ドローンについてなど、詳しくはお問い合わせください。
JET-Roboticsでは、水中ドローン以外にもさまざまな水中ロボットを解説しています。水中ロボット全体について詳しく知りたい方は、以下の記事をご覧ください。
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。