収穫ロボットとは? おすすめメーカーや現状の課題、種類を解説
人手不足が深刻化する農業現場で、収穫作業の自動化・省力化を担う収穫ロボット。「人手が足りず、収穫に時間がかかる」、「熟練作業者の目利きがないと品質が落ちる」といった悩みを抱える生産者も少なくありません。
本記事では、収穫ロボットの定義やメリット・デメリット、種類ごとの特徴から、選び方、そして信頼できるおすすめメーカーまでを網羅的に解説します。
収穫ロボットの導入を検討している方が、自分の圃場や作物に最適な機種と出会えるよう、実際の導入事例や技術的な比較ポイントも丁寧に整理しました。
本記事を読めば、あなたの農場に本当に適した収穫ロボットがどれかを見極めるヒントが得られるでしょう。
また、JET-Roboticsでは、収穫ロボット以外にもスマート農業に役立つさまざまな農業ロボットを解説しています。農業ロボット全体について詳しく知りたい方は、以下の記事をご覧ください。
収穫ロボット全製品(2件)
 タイル形式
タイル形式 リスト形式
リスト形式
1-2 / 2件

| 製品 | 詳細情報 |
|---|---|
|
🏆注目
237人が閲覧しました
メーカー:AGRIST株式会社特徴:最新のAI技術を活用して、収穫の適期を迎えたキュウリを画像解析により検出 ロボットがハウス内を巡回しながら、環境データを収集、勘と経験に頼らない安定的な栽培が可能 枝等の環境を傷つけないように作物に応じたセンサ等を用いた収穫ハンド |
|
|
🏆注目
210人が閲覧しました
メーカー:inaho株式会社特徴:AIがアスパラガスの生育状況を分析し、収穫適期の若茎を自動で収穫 夜間や高温下など人の働けない時間や期間もロボットが自動で収穫を行う 春芽の80%、夏芽の65%を自動で収穫した実績あり ※本研究の一部は生研支援センター「イノベーション創出強化研究推進事業(JPJ007097)」の支援を受けて実施しました。 ※詳細についてはご相談・お問い合わせをお願いいたします。 JET-Roboticsに問い合わせる |
1-2 / 2件
収穫ロボットのカタログ(1件)
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
収穫ロボットの基礎知識や導入のポイントについては、以下の解説をご覧ください。
人手不足が深刻化する農業現場で、収穫作業の自動化・省力化を担う収穫ロボット。「人手が足りず、収穫に時間がかかる」、「熟練作業者の目利きがないと品質が落ちる」といった悩みを抱える生産者も少なくありません。
本記事では、収穫ロボットの定義やメリット・デメリット、種類ごとの特徴から、選び方、そして信頼できるおすすめメーカーまでを網羅的に解説します。
収穫ロボットの導入を検討している方が、自分の圃場や作物に最適な機種と出会えるよう、実際の導入事例や技術的な比較ポイントも丁寧に整理しました。
本記事を読めば、あなたの農場に本当に適した収穫ロボットがどれかを見極めるヒントが得られるでしょう。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
また、JET-Roboticsでは、収穫ロボット以外にもスマート農業に役立つさまざまな農業ロボットを解説しています。農業ロボット全体について詳しく知りたい方は、以下の記事をご覧ください。
目次
最近の更新内容
2026/1/26更新 企業情報の更新
収穫ロボットとは?

収穫ロボットとは、農業の中でも特に労力と時間がかかる「収穫作業」を自動化・省力化するために開発されたロボットです。
人手に代わって果実や野菜を収穫し、運搬や選別までを担うものもあり、人手不足の解消や作業効率の向上に貢献します。
近年では、カメラやAIによる画像認識、ロボットアーム、GPS、自律走行などの先端技術を搭載し、作物の成熟度を判別して選別収穫する高性能な機種も登場しており、果樹園やビニールハウス、露地栽培など、幅広い農業現場で導入が進みつつあります。
収穫ロボットの導入が進む背景にあるのは、農業従事者の高齢化や労働力不足といった課題です。こうした社会的要請を受け、国内外のメーカーが多様な収穫ロボットを開発・実用化しており、スマート農業の重要な存在として注目されています。
次の章では、こうした収穫ロボットを導入することで得られるメリットを詳しく見ていきましょう。
人手作業と比較した際の収穫ロボットのメリット

収穫ロボットの導入により、従来の人手作業にはなかった以下のようなメリットが期待されます。
- 人手不足の解消
- 作業の標準化
- 長時間稼働が可能
収穫ロボットの導入には、まず、人手不足の解消というメリットがあります。農業従事者の高齢化や人材確保の難しさが深刻化する中でも、安定した収穫体制を維持できるのが特徴です。
また、収穫ロボットにより作業が標準化されることで、熟練者に頼らずとも一定の品質で収穫を行えるようになります。
さらに、人間のように休息を必要とせず、早朝や深夜といった時間帯でも稼働可能なため、収穫に最適な時期を逃しにくいという点も見逃せません。
次章では、収穫ロボットにはどのような種類があるのかを見ていきましょう。機構や活用シーンの違いを理解することで、自分に合った選択がしやすくなります。
圃場に合った種類の収穫ロボットを導入できるようにしよう
収穫ロボットにはいくつかの形態があり、目的や農場の環境に応じて選択することが重要です。ここでは代表的な3種類について紹介します。
自走式
自走式の収穫ロボットは、車輪やキャタピラを使って圃場内を自律的に走行し、収穫作業を行います。大型のものでは果樹の列の間を移動しながら果実を収穫するものもあります。
吊り下げ式
吊り下げ式収穫ロボットは、施設園芸や温室栽培で用いられるタイプで、天井に設置されたレールなどから吊るされ、移動しながら収穫作業を行います。
ドローン式
ドローン型の収穫ロボットはまだ実験的段階のものが多いですが、一部では軽量果実の収穫や運搬用途での活用が試みられています。
自分の圃場に合った収穫ロボットの種類の検討はついたでしょうか?
次章で収穫ロボットの普及にあたっての技術的・制度的な課題について確認しましょう。
収穫ロボットの現状における課題

収穫ロボットの実用化と普及を妨げる主な課題には、以下のような点が挙げられます。
- 作物ごとの特性対応
- 高精度センシングの必要性
- 農地環境の個別最適化
- 初期導入コストが高い
- メンテナンス・保守が必須
まず、作物ごとの形状や収穫に適したタイミングが異なるため、すべての作物に対応できる汎用的な収穫ロボットの実現には依然として課題が残っています。
また、収穫の精度を確保するためには、果実の位置や成熟度を正確に判断できる高精度なセンシング技術が求められます。
さらに、農地ごとに地形や設備環境が異なることから、それぞれの圃場に合わせた個別のカスタマイズが必要になるケースが多いことも課題のひとつです。
加えて、初期導入コストが高いことや、収穫ロボットを長期的に安定稼働させるためには、専門的な知識に基づくメンテナンスや定期的な保守作業が求められる点にも注意が必要でしょう。
次は、こうした課題を踏まえて、どのような観点で収穫ロボットを選べばよいかを詳しく解説していきます。
選定時に気を付けたい収穫ロボットの選び方
収穫ロボットを選ぶ際には、作業内容や作物の特性に応じた視点での選定が不可欠です。ここでは、特に重要となる3つの選定基準を解説します。
作物に適したハンドリング方式を選ぶ
最初に解説する収穫ロボットの選定ポイントは、作物に適したハンドリング方式(吸着・摘み取り・切断など)を備えている機種かどうかです。
この選定は、果実の硬さや形状、茎への付着力などと、ロボットのエンドエフェクタ構造や把持力の調整範囲といった要因によって左右されます。
適合しない方式の収穫ロボットを選ぶと、果実を傷つけたり収穫の取りこぼしが増えたりし、結果的に収量や出荷品質が低下するリスクがあります。特にイチゴやトマトのように軟らかくて傷みやすい作物を扱う現場では、この選定が重要でしょう。
最適なハンドリング方式を選べば、果実のダメージを最小限に抑え、高等級品として出荷できる割合を維持しやすいです。
視覚・センサーAIの精度と学習性を評価する
収穫ロボットを選ぶ上では、収穫物の成熟度を判別する視覚・センサーAIの精度と再学習のしやすさを重視するという観点も欠かせません。
AIの精度は、搭載されたカメラの分解能や照明条件への対応力、学習データの量と更新プロセスの設計といった技術的要素に影響されます。
この点を軽視すると、収穫のタイミングを誤ることが多くなり、未熟果や過熟果を混在させてしまい、品質不揃いによる売上低下を招いてしまうかもしれません。
特に、日射条件が日々変わる露地栽培や、朝夕で光量が変動する施設栽培では大事なチェックポイントです。
高精度かつ再学習が容易なAIを搭載した収穫ロボットを選べば、環境の変化にも柔軟に対応でき、収穫適期を逃すことなく安定した収穫と高い歩留まりが期待できます。
圃場環境に適した走行・移動方式を見極める
もう一つの重要な選定基準は、圃場環境に合った走行・自律移動方式(キャタピラ・台車・リール式など)を選ぶことです。
これは、圃場の畝幅や地形の起伏、路面の硬さといった物理的条件と、ロボット側の車体寸法や駆動形式、ナビゲーション精度の設計によって成否が決まります。
適合しない方式を選ぶと、圃場内での走行が不安定になったり、畝をまたぐことができずに結局人手での運搬や誘導が増え、導入効果が半減してしまいます。特に面積が広く、畝が長い農場などでは、こうした物理的適合性の確認が欠かせません。
圃場に適した走行方式の収穫ロボットを選べば、人手による介助なしで長時間稼働でき、収穫スケジュールの効率化と平準化が実現するでしょう。
最後の章では、当編集部おすすめの収穫ロボットメーカーを紹介します。
おすすめの収穫ロボットメーカーを厳選して紹介!

収穫ロボットを導入する際は、メーカーごとの技術力や製品の特長を把握することが欠かせません。ここでは、日本国内で代表的なおすすめの収穫ロボットメーカーを厳選し、それぞれの強みや導入事例を詳しく紹介します。
本章で紹介する製品には、補助金を活用して導入できる製品もあります。詳しくは以下よりお問い合わせください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
- AGRIST / アグリスト
- イナホ / inaho
- クボタ / Kubota
- ヤンマー / Yanmar
- 井関農機 / ISEKI
※クリックすると該当箇所まで飛びます
AGRIST / アグリスト
| 会社名 | AGRIST / アグリスト |
| 設立年 | 2019年 |
| 本社 | 宮崎県児湯郡新富町富田東1丁目47番地1 |
| 概要 | AIを活用した農業用ソフトウェアや自動収穫ロボットの開発、スマート農業パッケージの販売 |
アグリストはテクノロジーで農業課題を解決し、100年先も続く持続可能な農業の実現を目指すスタートアップ企業です。AIを搭載した自動収穫ロボット活用のスマート農業を全国で展開しているほか、栽培支援システムの開発も行っています。会社として、2023年までに農林水産大臣賞を含む国内外で20個以上の賞を受賞しているのも強みです。
農業ロボットは「キュウリロボット」などを取り扱っています。最新のAI技術を活用して、収穫の適期を迎えたキュウリを画像解析により検出します。スマートフォンやパソコンから直感的に操作ができ、レール走行式の設計により、安定した動きを実現、効率的に作業を行えるのが特徴です。
全国2位のきゅうり産地、JA全農ぐんまなどに導入の実績があります。農家の慢性的な労働力不足に対応できるほか、人件費の圧縮、ハウス内巡回機能、収量予測が可能なため、環境制御の向上による収穫量改善などが導入のメリットです。キュウリロボットのほかに、ピーマンロボットも取り扱っており、どちらのロボットも果菜類にも対応しています。
イナホ / inaho
| 会社名 | イナホ / inaho |
| 設立年 | 2017年 |
| 本社 | 神奈川県藤沢市鵠沼海岸5-8-23鵠沼パークハウス1F |
| 概要 | RaaSモデルによる自動野菜収穫ロボットを中心とした生産者向けサービスのご提供 |
イナホはテクノロジーで農業の自動化、スマート化を行うディープテックスタートアップです。自動収穫ロボットを中心とした作業の省人化、取得データによる生産の高度化、最先端の農業研究に基づいた作型の提案、AI・ロボティクス関連の受託研究/POC開発を日本とオランダで展開してます。
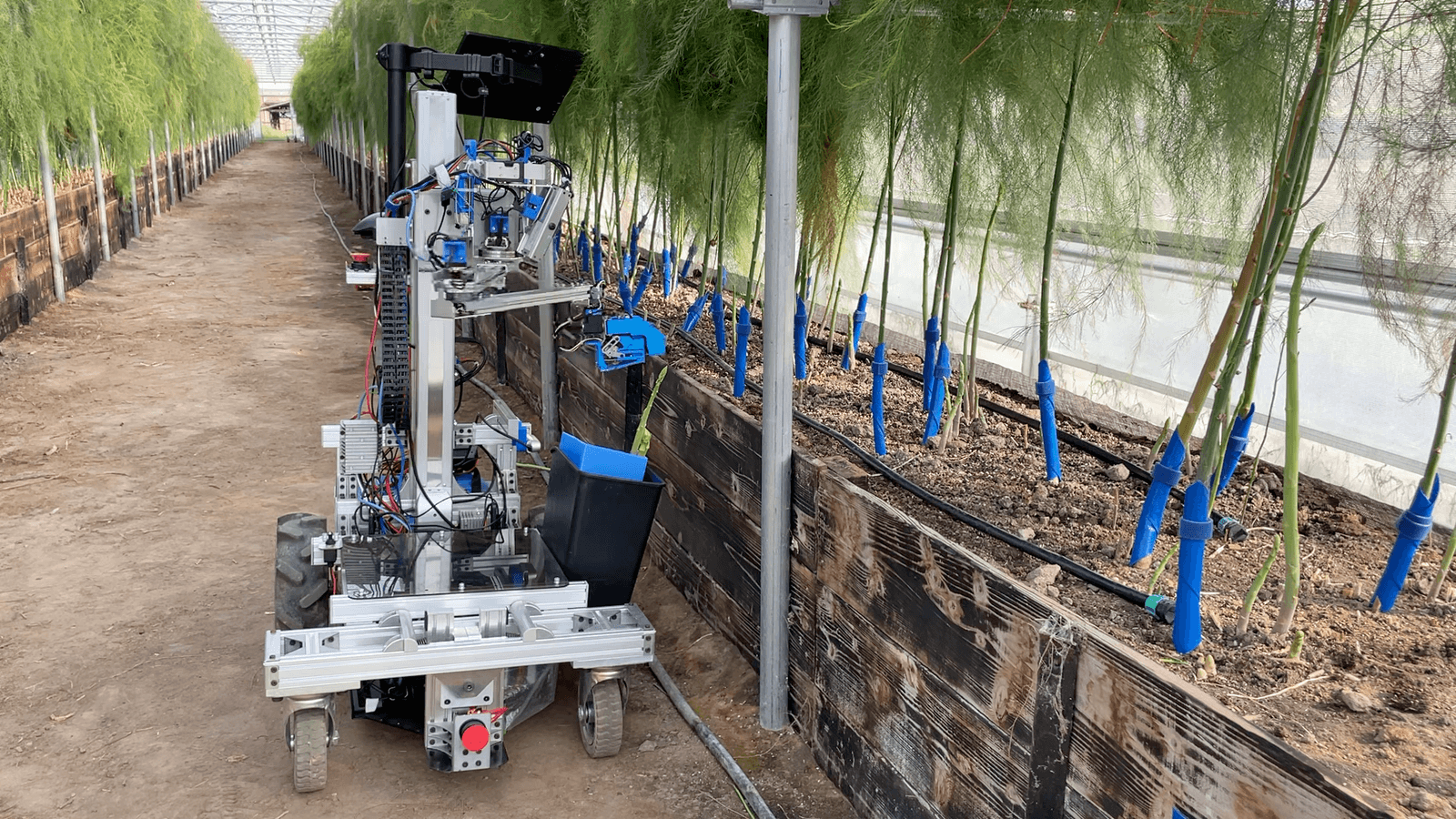
収穫ロボットは「高畝アスパラガス収穫ロボット」を展開しています。AIがアスパラガスの生育状況を分析し、収穫適期の若茎を自動で収穫します。大幅な省力化が見込まれる新しい栽培方式「枠板式高畝栽培」に対応し、アスパラガスの収穫作業時間を削減します。
春芽の80%、夏芽の65%を自動で収穫した実績があります。夜間や高温下など人の働けない時間や期間もロボットが自動で収穫を行うことが可能です。詳細については、ご相談・お問い合わせをお願いします。
クボタ / Kubota
| 会社名 | クボタ / Kubota |
| 設立年 | 1890年 |
| 本社 | 大阪府大阪市浪速区敷津東1丁目2番47号 |
| 概要 | 総合農業機械メーカー |
クボタは、同社は世界初の無人自動運転コンバインの量産化を実現し、KSASクラウドを活用したデータ連携と、全国に広がるアフターサービス網が強みです。
Agri Robo Combine WRH1200A/DR6130Aといった自動収穫ロボットを展開しており、完全無人での刈取りや収量マッピングといった機能を備えています。この収穫ロボットは、GNSS・レーザスキャナ・全周障害物検知によって、省人化と高精度収穫を同時に実現できるのが特徴です。
北海道江別市の西脇農場や富山市GFMなど、家族経営から大規模経営まで幅広く導入され、労働力不足への対応に貢献しています。
ヤンマー / Yanmar
| 会社名 | ヤンマー / Yanmar |
| 設立年 | 1912年 |
| 本社 | 大阪府大阪市北区茶屋町1番32号 YANMAR FLYING-Y BUILDING |
| 概要 | ディーゼルエンジンを核とする総合機械メーカー |
ヤンマーは、障害物検知センサーとタブレットベースのUIにより、オペレーター1人で2台のトラクタを同時に運用できる省力化制御が際立っています。
製品ラインナップにはYHシリーズロボットコンバインがあり、汎用性の高いヘッダ交換機構を搭載しています。米だけでなく麦類の自動収穫にも対応し、多用途で使えるのが強みです。
長野県の澤田農家や埼玉県の法人圃場では、導入により収穫効率が改善されたと報告されています。
井関農機 / ISEKI
| 会社名 | 井関農機 / ISEKI |
| 設立年 | 1926年 |
| 本社 | 愛媛県松山市馬木町700番地 |
| 概要 | 農業機械専業メーカー |
井関農機は、ICTと連携する「ISEKIリモート」により、現場の見える化とリモート保守に強みを持ち、スマート農業への対応力が際立っています。
代表的な収穫ロボットとしてはJapan HJ6115 スマートコンバインがあり、高精度なGNSS制御や収量センサを搭載しています。倒伏した稲にも対応し、収穫と同時にデータを自動収集できる点が特徴です。
岩手県の展示会や富山県の可変施肥実証圃場などでも導入され、収穫作業の効率化と精密農業化を両立しています。
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。