【2026年最新】IHはんだ付けロボットの特徴や導入プロセス、おすすめメーカーを解説
電子機器の小型化・高密度化に伴い、精密なはんだ付けの重要性が増しています。
さらに、従来の方法では扱いが難しかった熱に弱い部品や複雑な基板へ、非接触かつ局所的に素早く熱を加えることができるIH(誘導加熱)はんだ付けロボットは、有望な技術として注目度が高いです。
この記事では、IHはんだ付けロボットの基礎知識、メリット・デメリット、種類、選び方、価格相場、おすすめメーカーまでを解説します。
IHはんだ付けロボット導入をご検討の際に、どの機種が自社業務に最適かを見定め、判断を進めるための一助として、本記事をお役立てください。
また、JET-Roboticsでは、IHはんだ付けロボット以外にもはんだ付けロボットを解説しています。はんだ付けロボット全体について詳しく知りたい方は、以下の記事をご覧ください。
また、JET-Roboticsでは実際に、IHはんだ付けロボットの導入支援も行っております。
IHはんだ付けロボットの専門家による製品の選定から補助金の活用、ロボット研修による社内人材の育成まで、IHはんだ付けロボット導入をあらゆる面からサポートいたします。
「一度ロボットを触ってみたい」や「こんな自動化ができるか知りたい」などの軽い相談も可能です。
相談は無料ですので、関心のある方は以下のサービス詳細をご覧ください。
目次
最近の更新内容
2026/3/10更新 コンテンツの一部修正
2026/2/27更新 コンテンツの一部修正と追加
【2026年最新情報】IHはんだ付けロボットの進化とトレンド
IHはんだ付けロボットは、知能化・省エネ・高信頼化の観点で進化を続けています。検討・選定の前に、最新トレンドを押さえておくと失敗を防げます。
1. AI・ビジョンの高度化で品質と歩留りを安定化
従来の画像処理による位置補正に加え、AIを活用したビジョンが広がっています。ランドや端子の認識、フィレット形状やブリッジなどの微細な不良検出を学習し、μmオーダーの自動補正や外観検査の自動化を実現。高密度・狭ピッチ実装で有効です。
2. IoT/トレーサビリティで予知保全と工程最適化
温度・出力・時間・コイルID・画像ログ等をリアルタイムに収集し、予兆検知(コイルの劣化、供給装置の不具合など)や最適条件の探索に活用。SPC連携やOPC UA/MQTTなどで製造実績と紐づける動きが加速しています。
3. 閉ループ温度制御の標準化
IRセンサや熱電対の実測温度をIH電源の出力制御にフィードバックし、過昇温を抑制。プロファイルの再現性向上と熱ダメージ低減を両立します。
4. 雰囲気・フラックスの最適化とフラックスレス対応
窒素パージや低残渣フラックス、選択的塗布で酸化を抑え、外観と接合信頼性を強化。用途によりフラックスレスの検討も進んでいます。
5. パワーエレクトロニクス/車載案件への適用拡大
SiC/GaNモジュール、厚銅や大熱容量部品、金/錫系の高温はんだに対し、IHの高速・局所加熱が評価。熱影響を抑えながら所定温度へ短時間で到達可能です。
6. サステナビリティ(省エネ/廃棄物削減)
必要箇所のみを素早く加熱でき、消費電力削減に寄与。こて先などの消耗品削減やゼロ廃棄設計の装置も登場し、SDGs/脱炭素の観点で再評価が進んでいます。
7. 安全・環境・法規への配慮
EMC/EMF(電磁界)管理、周辺金属の不要加熱抑制、協働運用時の速度・分離監視/力制限、安全インターロックなどのリスクアセスメントが必須です。はんだ/フラックスのSDS確認や排気・臭気対策も合わせて検討しましょう。
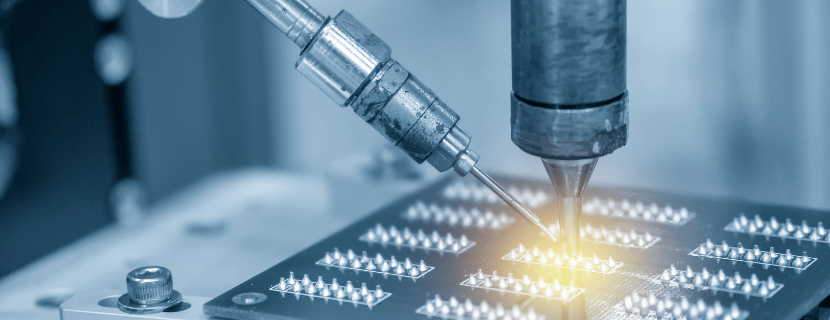
IHはんだ付けロボットとは? 特徴や活用例などを解説
IHはんだ付けロボットとは、高周波誘導加熱(Induction Heating、IH)の原理を利用して、はんだ付け作業を自動で行うロボットシステムのことです。
従来のこて式はんだ付けが、ヒーターで加熱したこて先を直接ワークに接触させて熱を伝えるのに対し、IHはんだ付けは、高周波電流を流したコイル(IHコイル)によって発生する磁力線を利用します。
この磁力線が金属であるはんだや接合部分を通過する際に渦電流を発生させ、その電気抵抗によって金属自体が発熱(ジュール熱)する仕組みです。
この原理により、IHはんだ付けロボットには以下のような特徴があります。
-
非接触加熱
コイルがワークに触れないため、物理的なダメージを与える心配がありません。微細な部品や熱に弱い部品のはんだ付けに適しています。 -
局所加熱
コイルの形状や配置を工夫することで、狙った箇所だけをピンポイントで加熱できます。周囲の部品や基板への熱影響を最小限に抑えられます。 -
高速昇温・精密な温度制御
金属自体が発熱するため、速く目標温度に到達します。また、出力調整や測定温度の反映により、精密な温度推移制御が可能です。 -
均一な加熱
磁力線が均一に作用すれば、接合部全体をムラなく加熱できます。
IHはんだ付けロボットの主な特徴
これらの特徴から、IHはんだ付けロボットは以下のようなメリットをもたらします。
一方で、デメリットや注意点も存在します。
IHはんだ付けロボットは、その優れた特徴から、以下のような分野・工程で活用されています。
IHはんだ付けロボットは、非接触・局所・高速加熱というユニークな特徴を持つ自動化技術です。そのメリット・デメリットを理解し、適切な種類や機種を選定することが重要になります。
次に、IHはんだ付けロボットにはどのような種類があるのか、それぞれの特徴を見ていきましょう。
種類ごとにIHはんだ付けロボットを解説
IHはんだ付けロボットは、その設置形態や得意とする生産方式によって、いくつかの種類に分類できます。ここでは代表的な3つのタイプについて、それぞれのメリット・デメリットを解説します。
卓上型(セル生産型)IHはんだ付けロボット
卓上型は、比較的コンパクトで、作業台の上などに設置して使用するタイプのIHはんだ付けロボットです。多くの場合、ロボットアーム、制御装置、IH電源、操作パネルなどが一体またはユニット化されており、導入や設置が比較的容易です。
手作業に近い感覚で自動化を進めたい場合や、多品種少量生産、試作・開発段階での使用に適しています。ロボット単体で完結しているため、既存の生産ラインへの影響を最小限に抑えつつ導入できる点が特徴です。
インライン型IHはんだ付けロボット
インライン型は、既存または新規の生産ラインに組み込んで使用することを前提としたIHはんだ付けロボットです。コンベアなどによる自動搬送システムと連携し、ワークの投入から位置決め、はんだ付け、搬出までの一連の工程を自動で行います。
主に量産ラインでの使用を目的としており、高い生産性と省人化効果が期待できます。複数のロボットや工程を連動させることで、複雑なはんだ付けプロセスにも対応可能です。
特殊用途型(カスタム)IHはんだ付けロボット
特殊用途型(カスタム)は、特定のワーク形状、材質、または特殊な工程要件に合わせて、オーダーメイドで設計・製造されるIHはんだ付けロボットです。
標準的な卓上型やインライン型では対応が難しい、複雑な三次元形状へのはんだ付けや、特殊な雰囲気下(例:窒素雰囲気)での作業、あるいは他の工程(例:検査、組立)との複合化など、ユーザー独自の要求に応えるために開発されます。
コイル形状の最適化はもちろん、ロボットの軸構成、搬送方法、制御システムなどが、対象ワークや生産プロセスに合わせて専用設計されます。
このように、IHはんだ付けロボットには生産形態や用途に応じた種類が存在します。自社の目的や生産規模、予算に合わせて最適なタイプを選ぶことが重要です。では、実際にIHはんだ付けロボットを導入する際には、どのようなプロセスを経るのでしょうか。次に導入プロセスについて解説します。
IHはんだ付けロボットの導入プロセスを解説

IHはんだ付けロボットの導入は、単に装置を購入して設置するだけではありません。期待する効果を得るためには、計画的なプロセスを踏むことが重要です。ここでは、一般的な導入プロセスを段階的に解説します。
1. 要件定義
まず、なぜIHはんだ付けロボットを導入したいのか、その目的を明確にします。「品質を安定させたい」「生産性を向上させたい」「熱影響を抑えたい」「人手不足を解消したい」など、具体的な課題や目標を設定します。
その上で、対象となるワーク(製品、部品)の種類、材質、形状、サイズ、はんだ付け箇所、求められる品質基準、現在の生産量、将来的な生産計画、予算などを詳細に洗い出します。これらの情報は、後の機種選定や仕様決定の基礎となります。
2. 機種選定・メーカー比較
要件定義でまとめた情報をもとに、具体的な機種やメーカーを選定します。各メーカーのウェブサイトやカタログ、展示会などで情報を収集し、自社の要件に合致する可能性のあるロボットをリストアップします。
比較検討する際には、ロボット本体の性能(加熱能力、制御精度、動作速度、可動範囲など)だけでなく、IH電源の仕様、コイルの種類やカスタマイズ性、ティーチングのしやすさ、周辺機器(ビジョンシステム、はんだ供給装置など)の有無、メーカーのサポート体制などを多角的に評価します。
3. デモンストレーション・はんだ付けテスト
候補となる機種が絞り込めたら、実際にデモンストレーションを依頼し、実機での動作確認や、自社のワークを使ったはんだ付けテストを行います。カタログスペックだけでは分からない、実際の加熱状態、はんだ濡れ性、仕上がり品質、操作性、工程時間などを確認します。
特にIHはんだ付けは、ワークの材質や形状、コイルとの位置関係などによって加熱効率が変わるため、テストは重要です。最適な加熱条件(周波数、出力、時間、コイル形状・位置など)を見つけ出すための評価もこの段階で行います。メーカーによっては、テストセンターでの評価や、実機貸し出しに対応している場合もあります。
4. 導入・設置・設定
機種が決定したら、契約、発注を経て、納品、設置作業へと進みます。インライン型の場合は、既存ラインへの組み込みや前後工程との連携も考慮した設置計画が必要です。設置場所の確保、電源・エアなどのユーティリティ供給、安全対策(安全柵、インターロックなど)も行います。
設置後は、ロボットの動作プログラム(ティーチング)や、はんだ付け条件(温度プロファイルなど)を設定します。メーカーのエンジニアによるサポートを受けながら、実際の生産条件に合わせて調整を行います。
5. 運用・保守
設定が完了し、試運転で問題がないことを確認したら、本番運用を開始します。導入初期は、予期せぬトラブルが発生することもあるため、メーカーのサポートを受けながら安定稼働を目指します。
運用にあたっては、オペレーターへの操作・メンテナンスに関するトレーニングが不可欠です。日常点検や定期的なメンテナンス計画を立て、実行することで、ロボットの性能を維持し、長期的に安定した生産を続けることができます。また、生産する製品が変わる場合は、再ティーチングや条件設定が必要になります。
以上が、IHはんだ付けロボット導入の一般的なプロセスです。各ステップを丁寧に進めることで、導入効果の最大化を期待することができます。さて、導入を検討する上で気になる要素の一つが価格でしょう。次に、IHはんだ付けロボットの価格について見ていきます。
IHはんだ付けロボットの価格に影響する要因と大まかな価格相場を解説

IHはんだ付けロボットの導入を検討する際、コストは重要な要素です。しかし、その価格は様々な要因によって変動するため、一概に「いくら」と言うのは難しいのが実情です。
ここでは、価格に影響する要因、大まかな価格相場を解説します。
価格に影響する主な要因
IHはんだ付けロボットの価格は、主に以下の要素によって決まります。
-
ロボットの種類と規模
卓上型/インライン型、アーム可動範囲、軸数などで価格が変動。量産向けや大型・多軸ほど高価。 -
IH電源の性能
出力(kW)、周波数帯、制御機能(閉ループ制御や測定温度フィードバックなど)が価格に直結。高出力・高機能ほど高価。 -
搭載機能・オプション
ビジョン(位置補正/検査)、はんだ供給、窒素雰囲気、各種センサ、専用治具/特殊コイルなどの追加で上振れ。 -
カスタマイズの有無
特定ワークや工程要件に合わせた専用設計・製作は開発費が上乗せされ高額化。 -
周辺設備・システムインテグレーション
安全柵/搬送装置/制御盤、検査工程との連携、ライン全体の構築費用も別途考慮が必要。 -
データ連携・トレーサビリティ要件
記録項目や保存要件(温度/出力/画像ログ等)、外部システム連携の範囲によって実装コストが変動。
大まかな価格相場
上記のように多くの変動要因があるため、あくまで目安ですが、IHはんだ付けロボットの価格帯は幅広いです。
比較的シンプルな構成の卓上型IHはんだ付けロボットであれば、数百万円台後半から導入可能なケースもあります。
一方で、高機能なオプションを多数搭載した卓上型や、標準的なインライン型ロボットになると、1,000万円を超えることが一般的です。さらに、大規模な生産ラインに対応するシステムや、高度なカスタム設計が必要な場合は、数千万円規模になることも珍しくありません。
これはロボット本体と基本的なIHシステムを含んだ価格イメージであり、周辺設備やシステム構築費用は別途必要になることが多いです。正確な価格を知るためには、自社の要件を具体的にまとめ、複数のメーカーに見積もりを依頼することが不可欠です。
初期投資とROI(投資対効果)の視点
IHはんだ付けロボットの価格は一見高額に思えるかもしれません。
しかし「品質向上による不良率削減」「生産性向上による人件費削減」「消耗品や電力・窒素等のランニングコスト低減」などの効果を定量化し、初期投資の回収期間(ROI)を試算することが重要です。
為替や需給により価格は変動しやすいため、最新の見積りを複数社から取得し、自社の要件(温度プロファイル、タクト、良品率、データ記録/連携範囲など)を明示すると精度が上がります。メーカーによってはROIシミュレーションをサポートしてくれる場合もあるため、相談してみると良いでしょう。長期的な視点で費用対効果を検討することが、導入成功の鍵になります。
3つの選定ポイントから、IHはんだ付けロボットの選び方を解説

IHはんだ付けロボットの導入効果を引き出すためには、自社の生産要件に最適な機種を選定することが不可欠です。ここでは、特に重要となる3つの選定ポイントについて解説します。
温度制御性能(出力制御範囲・測定温度の反映精度)
IHはんだ付けロボット選定の重要なポイントとして、IHコイルの出力制御範囲や測定温度の反映の精度を確認し、目的のはんだ付け温度プロファイルを安定して制御できるかを見極めることです。
この性能は、熱ダメージを受けやすい部品の有無や、熱伝導特性の異なる複数の素材(例:基板ランドと大型部品の端子)を同時にはんだ付けする工程があるかどうかといった要因によって、要求されるレベルが変わってきます。
もし、この温度制御性能の観点を無視してロボットを選んでしまうと、ワークや部品が必要以上に加熱され、焼損や特性劣化を招いたり、逆にはんだが十分に溶けず接合不良が発生したりするなど、不良率の増加につながる恐れがあります。
特に、高密度実装基板や熱にデリケートな電子部品、あるいは融点の異なるはんだを使用するラインでは、精密な温度管理能力が不可欠となるため、この選定ポイントは特に重要視すべきです。
適切な熱制御性能を持つロボットを導入することで、高精度な部品の損傷リスクを最小限に抑えながら、常に理想的な温度推移で加熱し、結果として良好なはんだフィレット形成と安定した接合品質を実現できるようになるでしょう。
IHコイルの形状・サイズと加熱エリアの最適化
次に重要な選定ポイントは、はんだ付けを行う箇所に適したIHコイルの形状やサイズを選択でき、はんだ付け対象だけを効率的に、かつ狙い通りに加熱できるかを検討することです。
この選択は、実装密度の高さ、はんだ付け箇所周辺の部品配置、ワークの形状(平面、凹凸、狭小部など)、あるいは特殊形状の部品配置といった要因によって、最適なコイルの形状やサイズ、そしてワークとの位置関係が変わってきます。
もし、このコイル選定と加熱エリアの最適化という要素を十分に考慮せずにロボットシステムを構築してしまうと、本来加熱したくない基板の広範囲や隣接する部品にまで熱が伝播してしまい、意図しない熱影響による基板の反りや部品の損傷リスクが高まります。
特に、部品間のクリアランスが狭い高密度実装基板や、サイズの異なる多様な基板、複数形状の部品を一つのラインで混在させて生産するような状況では、コイルの選択肢の広さやカスタマイズ性が重要な検討項目です。
ワークに対して最適なコイルを選定し、加熱エリアをピンポイントに制御できるロボットを選ぶことで、不要な熱拡散を最小限に抑え、熱影響によるはんだ付け不良の発生を劇的に減らし、製品全体の品質向上に貢献することが期待できます。
ビジョンシステム・自動位置補正機能の有無と精度
最後の重要な選定ポイントとして、カメラを用いたビジョンシステムや自動位置補正機能を有しており、基板や部品の位置ずれ、あるいははんだ付けポイントの微細な誤差をリアルタイムで検知し、ロボット動作やはんだ付け位置を自動で修正できるかを重視することが挙げられます。
この機能の必要性は、高ピッチ部品(狭隣接間隔の端子を持つ部品)やBGA/LGA、小型コネクタなど、実装精度がμm単位で厳しく要求される設計であるか、あるいは位置決めの精度が出にくい治具や搬送方式を採用しているかといった要因によって判断されます。
もし、位置補正機能を見落とすと、位置ずれやはんだ量の問題を放置することになり、接合不良や後工程のコスト増といった問題を引き起こしかねません。
高精度なビジョンシステムと自動補正機能を備えたロボットを導入すれば、生産ラインを稼働させながらでも、位置ずれやはんだ供給量の誤差をリアルタイムで補正し、潜在的なエラー要因を最小化しながら、常に高い接合品質を維持することが可能になるでしょう。
これらの3つのポイントを中心に、自社の製品や生産プロセスに合わせて各メーカーのIHはんだ付けロボットを比較検討することが、最適な一台を見つけるための鍵となります。それでは最後に、IHはんだ付けロボットを提供している代表的なメーカーをご紹介します。
JET-RoboticsがおすすめするIHはんだ付けロボットのメーカーを紹介

ここでは、IHはんだ付けロボットや関連技術を提供している主要なメーカーをピックアップし、それぞれの特徴や強みをご紹介します。是非、メーカー選定の参考にしてください。
JET-Roboticsでは、IHはんだ付けロボットを活用したIHはんだ付け工程の自動化支援も行っております。
ロボットの導入成功まで専門家がサポートいたします。相談は無料ですので、ぜひ以下よりサービス詳細をご覧ください。
- アポロ精工 / Apollo Seiko
- 島田理化工業 / SPC ELECTRONICS
- アロニクス / Alonics
- スフィンクス・テクノロジーズ / Sphinx Technologies
- アスヘ / Asue
※クリックで各メーカーの詳細に飛べます。
アポロ精工 / Apollo Seiko
| 会社名 | アポロ精工 / Apollo Seiko |
| 設立年 | 1969年 |
| 本社 | 静岡県御殿場市神場2271-7 |
| 概要 | 自動はんだ付け装置および関連FA機器メーカー |
アポロ精工は、世界で初めて自動はんだ付け装置を発明したパイオニアであり、50年以上にわたって業界をリードしてきた豊富な経験と実績が強みです。
同社のIHはんだ付けロボットとしては「J-CAT WAVE」シリーズなどが知られています。アポロ精工のIHはんだ付けロボットは、長年培ってきたはんだ付け技術のノウハウに加え、画像処理技術を活用した高精度な自動化・検査機能が搭載されている点が特徴です。
その信頼性の高さから、電子部品、自動車、産業機器、医療機器など、品質要求の厳しい多様な製造業で豊富な導入実績を持っています。
島田理化工業 / SPC ELECTRONICS
| 会社名 | 島田理化工業 / SPC ELECTRONICS |
| 設立年 | 1947年 |
| 本社 | 東京都調布市柴崎2-1-3 |
| 概要 | 高周波誘導加熱(IH)装置および電子・通信機器メーカー |
島田理化工業は、75年以上にわたる高周波技術やパワーエレクトロニクス技術の深い蓄積と、宇宙・医療・産業分野といった高信頼性が求められる領域での豊富な実績が同社の強みです。同社はIH技術のエキスパートとして、高周波誘導加熱技術を応用したはんだ付けソリューションを提供しています。
島田理化工業のIHはんだ付け技術は、長年の経験に裏打ちされた高周波誘導加熱技術に基づき、高効率かつ高精度な局所加熱を可能にします。これにより、ワークへの熱影響を最小限に抑えながら、高品質なはんだ付けを実現できる点が特徴です。
その技術力は、製造業全般はもちろん、電子・通信インフラ、宇宙、医療、交通インフラなど、極めて幅広い分野での導入実績によって証明されています。
アロニクス / Alonics
| 会社名 | アロニクス / Alonics |
| 設立年 | 2003年 |
| 本社 | 東京都大田区東糀谷6-4-17 OTAテクノCORE305 |
| 概要 | 高周波誘導加熱(IH)装置および関連機器のメーカー |
アロニクスは、顧客の個別のニーズに合わせた受注生産や、一点物の特殊な加熱装置の設計・製作を得意としている点が強みです。
同社は、その専門性を活かし、IH技術を用いたはんだ付け装置も手がけています。
アロニクスのIHはんだ付け関連技術は、高周波誘導加熱に関する高い専門知識に基づいており、狙った箇所だけを加熱するピンポイント加熱から、広い範囲を均一に加熱することまで、目的に応じて自在に制御できる点が特徴です。
製造業全般や理化学研究機関など、様々な分野で要求される特殊な高周波誘導加熱ニーズに応えてきた実績があり、はんだ付けにおいてもカスタム対応力に期待が持てます。
スフィンクス・テクノロジーズ / Sphinx Technologies
| 会社名 | スフィンクス・テクノロジーズ / Sphinx Technologies |
| 設立年 | 2016年 |
| 本社 | 神奈川県横浜市港北区新横浜1丁目18-3 |
| 概要 | 誘導加熱(IH)技術を活用した非接触加熱装置・はんだ付け装置メーカー |
スフィンクス・テクノロジーズは、世界初となる非接触IHはんだ付け技術を開発するなど、革新的な技術開発力が強みであり、局所加熱性能に加えて、ゼロ廃棄(はんだ屑が出ない)、低消費電力、消耗品削減といった経済性と環境性能を両立させた製品を提供しています。
同社のIHはんだ付けロボット・装置としては「S-WAVEシリーズ」が展開されています。S-WAVEシリーズは、ゼロ廃棄はんだの実現、低消費電力設計、コイルなどの消耗品削減といった、カーボンニュートラルや脱炭素社会への貢献を意識した設計思想が特徴です。環境負荷低減とコスト削減を同時に追求したい場合に魅力的な選択肢となります。
研究開発や試作などのテスト用途から、本格的な量産ラインまで幅広く対応可能で、電子部品や産業機器など多様な分野での採用実績があります。
アスヘ / Asue
| 会社名 | アスヘ / Asue |
| 設立年 | 2013年 |
| 本社 | 大阪府大阪市中央区平野町4-2-3 オービック御堂筋ビル6階 |
| 概要 | 電子材料・自動化装置・センシングデバイスなどを扱うエレクトロニクスメーカー |
アスヘは、ソフトウェアとハードウェアの両分野における最先端技術を持つエンジニアが多数在籍しており、顧客の多様な要望に対して高品質な技術提案を行い、柔軟なカスタマイズで応える対応力が強みです。
同社は自動化装置の一環として「IHはんだ付け装置(誘導加熱方式)」を提供しています。アスヘのIHはんだ付け装置は、非接触加熱方式の利点を活かし、熱容量が大きい部品や、逆に耐熱性が低いデリケートな部品にも対応できる点が特徴です。ターゲットのみを選択的に局所加熱することで、周囲への熱影響を最小限に抑える精密な制御が得意としています。
自動車産業、電子部品、産業機器など幅広い分野において、特に熱影響を避けたい精密部品のはんだ付けや、省エネルギー化が求められる生産現場での導入実績があります。
この記事では、IHはんだ付けロボットの基本情報から、種類、導入プロセス、価格、そして選定ポイントとおすすめメーカーまでを解説してきました。
IHはんだ付けロボットは、はんだ付けの品質と効率を高いレベルで両立させるための、有効な解決策となります。本記事で得た知識をもとに、ぜひ貴社に最適なIHはんだ付けロボットの導入を検討してみてください。