宇宙ロボットとは? おすすめメーカーやメリット、課題を解説
宇宙ロボットとは、宇宙空間や惑星など地球外の過酷な環境で、人間の代わりに作業を担うために開発された最先端のロボット技術です。
「どの種類を選べばよいの?」「具体的なメリットや課題は?」「信頼できるメーカーはどこ?」といった疑問を抱えている方も多いのではないでしょうか。
本記事では、宇宙ロボットの定義や種類、導入メリット、直面する課題、そして国内で注目されている研究室やおすすめメーカーまで、包括的にわかりやすくご紹介します。
宇宙開発や宇宙ビジネスに興味がある方、導入を検討している方にとって、本記事を読むことは正しい知識と判断軸を得る一歩となるはずです。
※JET-Roboticsの問い合わせフォームに遷移します。
※一部メーカーとは提携がない場合がありますが、ユーザー様に最適なご案内ができるよう努めています。
目次
宇宙ロボットとは? 定義や活用例を徹底解説
宇宙ロボットとは、宇宙空間やその他の惑星で人間の代わりに作業を行うために開発されたロボットです。これらのロボットは、過酷な宇宙環境での作業を支える重要な役割を担っています。
本章では、宇宙ロボットの定義から、具体的な活用事例までを詳しく解説し、その役割と未来の可能性を探ります。
宇宙ロボットの定義と特性
宇宙ロボットとは、地球の重力圏外の宇宙空間、あるいは惑星の表面などで、人間の代わりに作業を行うために設計されたロボットのことを指します。
これらの宇宙ロボットは、過酷な環境条件で動作するために、耐熱性、耐放射線性、真空環境への適応力、さらには通信遅延に対応する能力が求められます。
宇宙空間の極端な温度変化や、放射線、高真空状態では、地球上で使われるロボット技術がそのままでは通用しません。そのため、宇宙ロボットには特別な設計が必要です。
たとえば、温度調整システム、強力な耐放射線技術、そして長時間の自律動作を可能にするバッテリーやエネルギー管理システムが搭載されています。
宇宙ロボットは、遠隔操作や自律的な動作が可能であり、科学探査、衛星の保守、宇宙建設作業、搬送、さらには新たな惑星の探査においても重要な役割を果たしています。
これらのロボットの主な目的は、宇宙ミッションを効率化し、コストを削減し、危険を最小限に抑えることです。
宇宙ロボットの代表的な活用例
宇宙ロボットはさまざまな宇宙ミッションで活躍しています。その活用領域は広範囲にわたり、以下のような例があります。
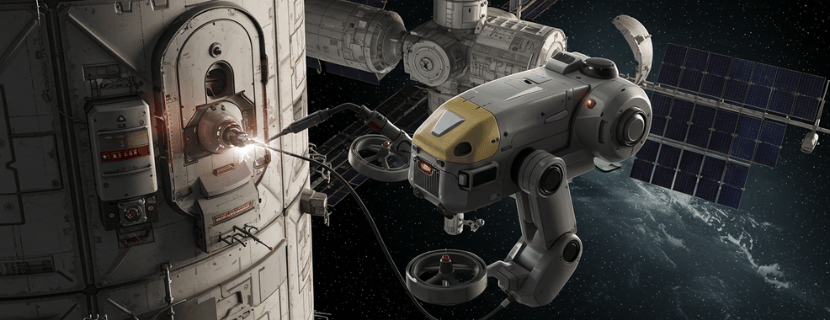
- 宇宙ステーションでの保守・修理作業
国際宇宙ステーション(ISS)では、宇宙ロボットが貨物船のドッキング作業や定期的な点検を担当しています。 -
惑星探査ミッション
例えば、NASAの「キュリオシティ」火星探査機は火星の表面を探索し、データを地球に送信しています。これらの宇宙ロボットは、人間が到達することのできない場所で貴重な科学データを収集します。 -
宇宙ゴミ(デブリ)の除去作業
宇宙ゴミは地球周辺の軌道を回る不要な人工物であり、これを除去するための宇宙ロボット技術が研究されています。これにより、今後の宇宙開発における安全性を向上させることが可能となります。 - 月面や火星でのインフラ建設支援
月面や火星におけるインフラ建設においても、宇宙ロボットが役割を果たします。これには、物資の搬送や構造物の組み立てを担うロボットが活用されています。
たとえば、NASAの「カナダアーム2」は国際宇宙ステーション(ISS)で活躍しており、貨物船のドッキング作業や点検作業を行うことで、宇宙での作業の効率化に貢献しています。
このロボットアームは、精密な操作が可能であり、宇宙での無人作業を支える重要な技術として注目されています。
このように、宇宙ロボットは今後の宇宙開発において欠かせない存在となり、様々な分野での活用が期待されています。
次の章では宇宙ロボットのメリットと課題を確認しましょう。
宇宙ロボットのメリットと課題を解説
宇宙ロボットは、厳しい宇宙環境での作業を支援するために開発され、いくつかのメリットがありますが、その一方で、実際の運用には課題も伴います。
この章では、宇宙ロボットのメリットと、それに伴う課題について詳しく解説し、どのようにそれらが宇宙探査に影響を与えるかを解説します。
宇宙ロボットのメリット
宇宙ロボットには、地球上で行えない作業を実行できるという特長があります。具体的なメリットとしては以下の点が挙げられます。
宇宙空間は、強い放射線や極端な温度変化といった人間には過酷な環境ですが、ロボットはそうした人間が直接立ち入ることが難しい危険な場所でも、惑星探査や施設の修理といった任務を遂行できます。
さらに、宇宙望遠鏡のメンテナンスや科学実験のように、ミリ単位の極めて高い精度が求められる作業も、プログラム通りに正確かつ安定してこなすことが可能です。
そして何より、これらの危険で精密な作業をロボットに任せることで、宇宙飛行士を放射線被ばくや不慮の事故といった生命のリスクから守ることができます。
これらのメリットにより、宇宙ロボットは宇宙探査において欠かせない存在となり、ミッションの効率化や安全性の向上が実現されています。
宇宙ロボットの課題
宇宙ロボットは有用である一方、実際の運用にはいくつかの技術的な課題もあります。以下は、その主な課題です。
修理が困難な宇宙の過酷な環境で長期間にわたり稼働し続けるための、高い耐久性が求められます。
さらに、地球との通信遅延によってリアルタイムの操作ができないため、ロボット自身が状況を判断して行動する高度な自律性も不可欠です。
そして、これらすべてを支えるエネルギーも、太陽光や原子力といった限られた供給源に頼らざるを得ず、その電力を無駄なく使う巧みなエネルギー管理技術が成功の鍵を握ります。
これらの課題に対しては、技術革新や改良が必要であり、研究者たちはこれらの問題を解決するために取り組んでいます。
宇宙ロボットは、さまざまなメリットを提供しつつも、課題を克服し続ける必要があります。次の章では、宇宙ロボットの種類とその特徴について確認しましょう。
宇宙で活躍するロボットの種類とその役割
宇宙で活躍するロボットには、特定の役割や作業内容に応じた多様なタイプが存在します。
この章では、代表的な宇宙ロボットの種類を紹介し、各ロボットがどのような環境や状況で活躍しているのか、またその利点と課題について詳しく解説します。
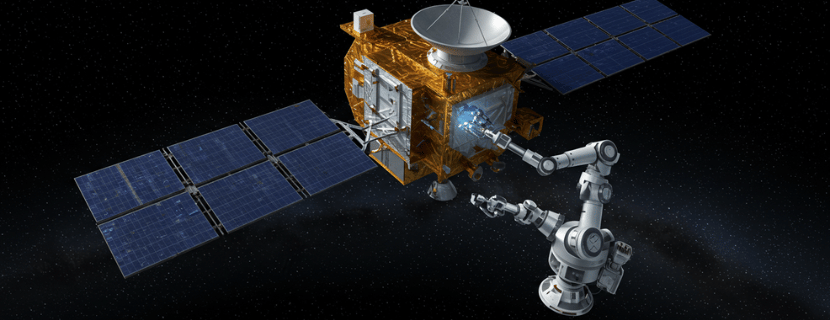
アーム型ロボット
アーム型ロボットは、宇宙ステーションや探査機に搭載され、主に作業対象を掴んだり、移動させたりすることに特化した宇宙ロボットです。
精密な操作が可能で、保守作業や補給、組立作業、さらには宇宙ゴミの除去など、宇宙での細かな作業を実行します。
例えば、NASAの「カナダアーム2」は、国際宇宙ステーション(ISS)で貨物船のドッキング作業や点検作業を担当しており、宇宙での人類の作業をサポートする重要なツールとなっています。特に、遠隔操作での精密な作業が可能であり、ISSの運用に欠かせない存在です。
ローバー型ロボット
ローバー型ロボットは、惑星の表面を移動しながら探査を行うための宇宙ロボットです。火星や月面探査で頻繁に使用され、荒地を走破する能力を持ち、障害物を避けながら自律的に作業を行うことが可能です。特に表面探査やサンプル採取、環境分析において重要な役割を果たしています。
NASAの「キュリオシティ」や「パーサヴィアランス」は、火星探査における代表的なローバー型ロボットで、これらは自律的に移動し、火星表面のデータを収集しています。
さらに、これらのローバーは多機能な観測機器を搭載しており、さまざまな実験を同時に行うことが可能です。
ローバー型ロボットは、広範囲の探査が可能であり、特に人類が到達できない遠隔地での科学調査を進めるために不可欠な存在です。
ヒューマノイド型ロボット
ヒューマノイド型ロボットは、人間の形態に似た宇宙ロボットで、将来的な宇宙基地での作業を想定して設計されています。人間の動きを模倣し、さまざまな作業に柔軟に対応できることが特徴です。
ヒューマノイド型ロボットは、特に長期的な有人ミッションや基地での作業で重要な役割を担うと期待されています。
現在の技術では、まだ発展途上ですが、例えば、NASAの「R2」やロシアの「Fedor」などがその例です。将来的には、月面や火星基地で人間と一緒に働く宇宙ロボットとして注目されています。
ヒューマノイド型ロボットは、人間が行うような繊細で複雑な作業を代替することが可能であり、宇宙開発の進展に影響を与える可能性を秘めているでしょう。
それぞれの宇宙ロボットには異なる特性と得意分野があり、用途に応じて最適なロボットが選ばれます。
次の章では、宇宙ロボットの選定ポイントを解説します。
宇宙ロボットの選び方
宇宙ロボットの導入にあたっては、ミッションの特性に応じた適切な選定が重要です。
ここでは、選定時に考慮すべき3つの視点から、宇宙ロボットの選び方について解説します。
宇宙ロボットの環境適応性を重視する
宇宙ロボットの選定ポイントとして環境適応性を重視するという観点があります。
これは、宇宙空間や惑星、衛星などの過酷な環境に対応する耐久性や、温度・放射線・真空への耐性といった性能の有無が、選定時に判断材料になるからです。
宇宙環境は極端な温度変化、強い放射線、真空、そして通信の遅延など、厳しい条件です。これに対応するため、宇宙ロボットは特殊な設計が求められます。例えば、温度管理システムや放射線シールド、真空環境での機能性を保つための技術が必要となります。
このような観点を無視して宇宙ロボットを選んでしまうと、環境に適応できず性能が著しく低下したり故障したりするリスクが増し、作業の遅延や中断を招く可能性が生じるでしょう。
特に、遠隔操作による長期作業や、地球から離れた場所での無人運用が必要な場合には、この観点が重要です。
特定の環境で最適に機能する宇宙ロボットを選ぶことで、安定した作業の継続が可能になり、長期間の運用が見込めるのが、この選び方を重視するメリットです。
宇宙ロボットの精密さと操作性を重視する
次に、宇宙ロボットの選定ポイントとして宇宙ロボットの精密さと操作性を重視することも重要です。
これは、ミッションで求められる精度や、微細な部品の取り扱いが可能かどうかという点が、宇宙ロボットの選択基準に深く関係してくるためです。
この観点を軽視したまま選定を進めると、作業精度が不十分になり、誤操作によるトラブルやミッション失敗の原因となりかねません。とくに衛星の修理や科学実験、惑星表面でのサンプル収集など、繊細な操作が求められる場面ではこの視点が欠かせません。
また、宇宙ロボットの操作は遠隔で行われるため、通信ラグや操作ミスのリスクを抑えるためにも、精度の高い操作性が不可欠です。
高精度の操作が可能なロボットを選ぶことで、危険な環境でのミッションも高い成功率を期待できるため、操作性と精密さの評価は重要です。
宇宙ロボットのエネルギー効率を重視する
次に注目すべき視点は、宇宙ロボットのエネルギー効率を重視するということです。
宇宙空間では、使用できる電力に制限があり、主に太陽光発電や蓄電池によって賄われます。したがって、無駄な電力消費がないか、長時間稼働できる設計になっているかといった点が、選び方の判断軸になります。
この視点を無視してしまうと、ミッション中に電力切れでロボットが停止し、作業が中断するリスクが高まります。とくに予算が限られていたり、補給が難しい環境で長期的な作業が想定されている場合、この選び方の重要性が際立ちます。
近年では、効率的な太陽光発電技術や長寿命のバッテリー技術が進展しており、これによりエネルギー効率の改善が進んでいますが、それでもエネルギー管理は重要な選定基準です。
エネルギー効率が良いロボットを選ぶことで、長期間の活動が可能となり、維持管理コストの低減も期待できるため、選定時には必ずチェックしておきたいポイントです。
自律性と通信遅延への対応を重視する
宇宙ロボットには、通信遅延が課題となるため、自律性も選定時に重要な視点です。
遠隔操作が可能でも、宇宙空間では通信にラグが生じるため、宇宙ロボットが自律的に判断し、動作できる能力が求められます。これにより、通信が不安定な状況でもスムーズに作業を進めることが可能になります。
自律型ロボットは、指示なしでも状況を分析し、適切な対応を取ることができるため、長期的なミッションや遠隔地での作業には欠かせない要素です。
したがって、宇宙ロボットの自律性と通信遅延への対応能力は、特に火星や月面探査などでの成功に直結する重要な基準となります。
以上のように、環境適応性・操作精度・エネルギー効率・自律性という4つの視点から、宇宙ロボットを選ぶ際の基準を理解することで、ミッション成功の可能性を高めることができます。
次の章では、宇宙ロボットの研究を行っている研究室を紹介します。
宇宙ロボットを研究している研究室を紹介
宇宙ロボット技術は日々進化しており、世界中の研究室や機関がその開発に取り組んでいます。
この章では、宇宙ロボット技術を研究・開発している代表的な研究室や機関をいくつか紹介し、最新の研究内容について触れていきます。
東京大学 宇宙科学研究所
東京大学 宇宙科学研究所は、宇宙科学と宇宙技術の研究において世界的に高い評価を受けている日本の研究機関です。
宇宙ロボットの研究にも積極的に取り組んでおり、特に宇宙探査ミッションにおけるロボットの自律的運用に関する研究が行われています。
代表的な研究には、月面探査ロボットや火星探査ロボットの開発があり、これらのロボットは複雑な環境下での長期間の動作を実現するための技術が研究されています。
京都大学 宇宙探査研究センター
京都大学 宇宙探査研究センターは、宇宙探査技術の最前線を研究する日本の有名な研究機関です。
このセンターでは、宇宙ロボットを利用した科学実験や惑星探査を行うための技術開発が進められています。
特に注目される研究には、ローバー型探査機やロボットアームを活用したサンプル採取技術があり、これらの技術は今後の宇宙ミッションにおいて重要な役割を果たすでしょう。
研究センターは、宇宙での活動におけるロボットの精密操作や長期運用の課題に取り組み、科学的な成果を出すための技術開発を行っています。
名古屋大学 宇宙ロボット研究室
名古屋大学 宇宙ロボット研究室は、宇宙ロボットに関する基礎的な研究と応用技術の開発を行っている研究室です。
この研究室では、宇宙環境でのロボットの高精度な操作技術や、極限環境下での自律型ロボットの開発が行われています。
特に、人工衛星や惑星探査機の自律運用技術に焦点を当てており、ロボットが人の手を借りずに作業を完遂するための技術の研究が行われています。
北海道大学 宇宙科学研究所
北海道大学 宇宙科学研究所では、宇宙ロボット技術を使った新しい宇宙探査ミッションの開発が行われています。
特に注目すべきは、火星や小惑星へのロボットによる探査技術です。
研究所では、宇宙ロボットが宇宙空間での長期間にわたる独立した作業を実行できるようにするための高度なアルゴリズム開発が進められています。
また、宇宙環境の厳しい条件下でも作業を継続できるようなロボットの耐久性向上にも取り組んでいます。
神戸大学 宇宙工学研究室
神戸大学 宇宙工学研究室では、宇宙ロボットの設計・運用に関する研究が行われています。
この研究室の特徴的な研究テーマは、宇宙環境でのロボットの物理的な設計技術です。特にロボットの動作精度や機動力、エネルギー効率に重点を置いています。
また、宇宙での運用時にロボットが直面するさまざまな課題に対して、実用的な解決策を提供するための技術開発が行われています。
最後に、宇宙ロボットのおすすめメーカーについて確認しましょう。
おすすめの宇宙ロボットメーカーなどの会社を紹介

宇宙ロボットの分野では、日本国内にも数多くの優れた会社が研究・開発に取り組んでいます。
ここでは、信頼と実績のある宇宙ロボット関連会社を紹介します。
※JET-Roboticsの問い合わせフォームに遷移します。
※一部メーカーとは提携がない場合がありますが、ユーザー様に最適なご案内ができるよう努めています。
- ジャクサ / JAXA
- エヌイーシー / NEC
- 富士通 / Fujitsu
- 三菱電機 / Mitsubishi Electric
※クリックすると該当箇所まで飛びます
ジャクサ / JAXA
| 会社名 | ジャクサ / JAXA |
| 設立年 | 2003年 |
| 本社 | 東京都調布市深大寺東町7-44-1 |
| 概要 | 日本の宇宙開発機関 |
ジャクサは、宇宙探査、衛星運用、有人・無人ミッションにおいて国内トップクラスの実績と技術力を誇り、宇宙ロボットに関する設計から開発、運用まで広く手がけています。
これまでにKibo(きぼう)実験棟やHTV(こうのとり)補給機、MMX(火星衛星探査機)といった実績あるロボットを展開しています。宇宙ロボットの設計・開発・運用全般において、国内で多くの実績と信頼を有する点が強みです。
実際に、国際宇宙ステーション(ISS)での実験棟運用や月面探査計画、火星衛星探査計画など、幅広い宇宙ミッションで活用されています。
エヌイーシー / NEC
| 会社名 | エヌイーシー / NEC |
| 設立年 | 1899年 |
| 本社 | 東京都港区芝五丁目7番1号 |
| 概要 | ICT・AIソリューションの総合電機メーカー |
エヌイーシーは、宇宙通信や衛星システムにおける高い技術力を背景に、宇宙ロボットの運用・通信・制御まで一貫して対応できる体制を持ちます。
代表的な製品には、H-IIAロケット用衛星通信機器や宇宙ロボット技術を活用した衛星システムがあります。
宇宙通信技術と衛星システムの総合力により、宇宙ロボットの運用・通信・制御を一貫して提供できる点が強みです。
富士通 / Fujitsu
| 会社名 | 富士通 / Fujitsu |
| 設立年 | 1935年 |
| 本社 | 神奈川県川崎市中原区上小田中4-1-1 |
| 概要 | 総合IT企業 |
富士通は、宇宙ロボット技術とAI・IoT技術を融合させることにより、高度で効率的な宇宙ミッションの実現を支援しています。
同社が開発した宇宙ロボット技術の一例は、宇宙ロボット技術を活用した衛星システムや、AI・IoT技術を活用した宇宙ミッションです。
宇宙ロボット技術とAI・IoT技術の融合により、効率的で高度な宇宙ミッションの実現が可能であり、最先端技術を駆使して数々のミッションを成功に導いています。
三菱電機 / Mitsubishi Electric
| 会社名 | 三菱電機 / Mitsubishi Electric |
| 設立年 | 1921年 |
| 本社 | 東京都千代田区丸の内2-7-3 東京ビル |
| 概要 | インフラ、自動車機器、ロボット, 半導体、ビル、家電などのメーカー |
三菱電機は、電機技術を中心に数多くの産業分野で活躍しています。
宇宙ロボット技術においても高い技術力を有し、H-IIAロケット用衛星通信機器や宇宙ロボット技術を活用した衛星システムなどを提供しています。
宇宙ロボット技術と衛星システムの総合力により、宇宙ミッションの実現力が高いという点が強みです。
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
宇宙ロボットの製品はまだありません。