ロボットハンドのおすすめメーカーを紹介! 種類や活用事例も解説
ロボットハンドとは、ロボットが物を持ち上げて移動させるために必要な部品です。
ロボット部品の選定は、用途や環境ごとに多種多様な部品が販売されているため難しいイメージがあるでしょう。
その中でも特にロボットハンドは、商品となる対象物に直接触れる部分のため、選定に神経を使う部品です。
この記事では、代表的なロボットハンドの種類や、選定の際に意識すべき要素、オススメのメーカーについて解説します。
ロボットハンドを選定するための基礎知識が身に付くため、ぜひ最後まで読み、正しい選定をスタートしましょう。
また、JET-Roboticsでは実際に、ロボットハンドの導入支援も行っております。
ロボットハンドの専門家による製品の選定から補助金の活用、ロボット研修による社内人材の育成まで、ロボットハンド導入をあらゆる面からサポートいたします。
「一度ロボットを触ってみたい」や「こんな自動化ができるか知りたい」などの軽い相談も可能です。
相談は無料ですので、関心のある方は以下のサービス詳細をご覧ください。

ロボットハンド全製品(15件)
 タイル形式
タイル形式 リスト形式
リスト形式
1-12 / 15件
- 1
- 2







| 製品 | 詳細情報 |
|---|---|
|
🏆注目
628人が閲覧しました
メーカー / 代理店:富士精工株式会社特徴:CFRP採用と内部中空化で軽量化、可搬重量が小さいロボットアームにも対応 反時計所のカスタマイズにより、多種多様なワーク形状に対応 90%オーダーメイドで作成しているのでワークに応じて最適なロボットハンドをご提案 |
|
|
🏆注目
593人が閲覧しました
メーカー:株式会社近藤製作所特徴:最大把持力20,000Nの高把持力 耐熱仕様や落下防止仕様などのオプションをラインナップ ロボット装置だけでなくローダー装置にも最適 JET-Roboticsに問い合わせる |
|
|
🏆注目
534人が閲覧しました
メーカー / 代理店:フォームハンド / 株式会社IZUSHI特徴:吸着ハンドが苦手とする表面が粗い、湾曲形状、多孔質といった物体への吸着可能 高いグリップ性を発揮し、表面形状が複雑な物体に対しても安定した吸着・搬送が可能 多孔質な物体に対して、グリップパッド表面と対象物の接触面積がある程度確保されれば吸着が可能 ハンドのみの販売も、エアツール全般のセット販売も行っている ハンド製品 |
|
|
503人が閲覧しました
メーカー:株式会社クリエイティブテクノロジー特徴:エア不要の静電吸着により、省エネかつ低騒音で、環境負荷を抑えたクリーンな搬送を実現 バキュームでは把持しにくい薄物・繊細素材・高通気性ワークも安定して吸着し、ダメージレスで搬送可能 サイズや材質の異なるワークにも柔軟に対応し、段取り替えを最小限に抑えて多品種生産を効率化 画像1枚目は金属箔を吸着搬送している様子の全体像。画像2枚目にあるような吸着面によって吸着することで、画像3枚目のように薄物であってもダメージレスで搬送 JET-Roboticsに問い合わせる |
|
|
493人が閲覧しました
メーカー:株式会社FingerVision特徴:視触覚センサの搭載により、1種類のフィンガータイプで様々なワークのハンドリングを「滑り分布」と「力分布」の情報を活用することで実現。フィンガーラインナップも随時追加。センサ・電動グリッパ・制御PC(laptopもしくはdesktop)のセットで購入可能(写真1枚目) カメラ画質に優位性のあるParallelタイプ(写真2枚目)や、機能性(形状や薄さなど)に優れたAngleタイプ(写真3枚目)など、用途に合わせてカメラタイプの選択が可能 曲面形状の把持面により、円筒形のワークや束ねられているワーク、小型のウエハなどのハンドリングを実現するCy11(写真4枚目) 指先よりも細い形状により、バラ積みなどのPick時のスペースが狭いワークや小型ワークへの汎用的な対応を実現するSS2(写真5枚目) 従来形状のバージョンアップタイプ。グリッパからの距離を近くすることで把持力をロスなく伝達できるα on β(写真6枚目) カップ状かつ把持面に凹凸を作ることで摩擦を作り、食材に代表される柔らかく、不定形なワークに対して、少ない把持力でのナイーブなハンドリングを実現するM6(写真7枚目) ※写真は開発中のもののため、製品版は若干変更になる可能性あり JET-Roboticsにお問い合わせ |
|
|
447人が閲覧しました
カタログあり 特徴:柔軟なシリコン成形グリッパーで、幅広いイレギュラーな形やデリケートな物体も簡単に扱える 壊れやすくデリケートな物体も安全に扱え、より高品質な生産で廃棄物を減らせる 外部からの給気がないため、ホコリ、騒音、複雑性、追加コストがない |
|
|
423人が閲覧しました
カタログあり 特徴:ロボット先端に最適なロングストローク&薄型タイプの電動グリッパ 把持位置を任意に設定可能なため、幅広いサイズの多品種ワークをツールチェンジすることなく把持 用途事例は組立、ハンドリング、検査など JET-Roboticsに問い合わせる |
|
|
419人が閲覧しました
メーカー:シナノケンシ株式会社特徴:把持力110Nで3kg程度のものをやさしくつかめ、開口幅も73mmと大きいため、様々なワークの把持が可能 電源が落ちても機械的に保持するため、不意の停電でもワークの落下を防ぐ トルク、位置、速度など細かな把持力調整が可能なため、たとえば部品把持もできる |
|
|
407人が閲覧しました
カタログあり 特徴:複雑でコストのかかる外部給気を必要としない、即導入可能な電動磁気グリッパー 部品検出と力調整が容易にできる内蔵型インテリジェンスにより、さまざまなサイズや重量の部品に確実に対応 あらゆる用途のニーズに対応する、コンパクトでカスタマイズ可能な高速グリッパー |
|
|
396人が閲覧しました
メーカー:株式会社近藤製作所特徴:協働ロボットに直接取り付け可能 センサとバルブの制御はロボットのティーチングペンダントで簡単制御 クロスローラ2爪、薄型2爪、薄型3爪の3機種をラインナップ JET-Roboticsに問い合わせる |
|
|
395人が閲覧しました
メーカー:シナノケンシ株式会社特徴:把持力5Nで300g程度のものをやさしくつかめ、ストロークもΦ143と大きいため、様々なワークの把持が可能 ハンド中心に穴が開いた中空構造でカメラやセンサを使うなど、構造を活かしたカスタマイズが可能 トルク、位置、速度など細かな把持力調整が可能なため、たとえば饅頭のパレタイジングもできる |
|
|
369人が閲覧しました
カタログあり 特徴:コンパクトで軽量な粘着グリッパーは、ケーブル、電気、空気、プログラミングが不要で、費用対効果が高く、プラグアンドプレイが可能 平板、平滑、多孔質体の表面の対象物用の革新的な粘着グリッパーはこれまで不可能だったタスクの自動化を実現 光沢のある表面でもグリップの跡がつかず、クリーニング工程が不要なため、時間を削減し生産性を向上 |
1-12 / 15件
- 1
- 2
ロボットハンドのカタログ(6件)
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
ロボットハンドの基礎知識や導入のポイントについては、以下の解説をご覧ください。
ロボットハンドとは、ロボットが物を持ち上げて移動させるために必要な部品です。
ロボット部品の選定は、用途や環境ごとに多種多様な部品が販売されているため難しいイメージがあるでしょう。
その中でも特にロボットハンドは、商品となる対象物に直接触れる部分のため、選定に神経を使う部品です。
この記事では、代表的なロボットハンドの種類や、選定の際に意識すべき要素、オススメのメーカーについて解説します。
ロボットハンドを選定するための基礎知識が身に付くため、ぜひ最後まで読み、正しい選定をスタートしましょう。
また、JET-Roboticsでは実際に、ロボットハンドの導入支援も行っております。
ロボットハンドの専門家による製品の選定から補助金の活用、ロボット研修による社内人材の育成まで、ロボットハンド導入をあらゆる面からサポートいたします。
「一度ロボットを触ってみたい」や「こんな自動化ができるか知りたい」などの軽い相談も可能です。
相談は無料ですので、関心のある方は以下のサービス詳細をご覧ください。
最近の更新内容
2026/7/16更新 コンテンツの修正・更新
2026/2/5更新 企業情報の更新
ロボットハンドとは? 特徴と使用方法について
ロボットハンドとは、人間の手の機能を模倣するように設計されたロボットの一部分です。
この技術は、さまざまな産業や研究領域で使用されており、特に製造業、医療、災害救助などの分野で重宝されています。
ロボットハンドは、物を掴んだり持ち上げたり、細かい作業を行う能力を持っているため、人間の手が届かない場所や危険な環境での作業にも活用可能です。
ロボットハンドは大きく分けて、単純なグリッパーや吸着から、人間の手と同じように複雑な動きを再現できる高度に発達したものまで幅広い種類があります。
ロボットハンドの使用方法
ロボットハンドの利用にはセンサーやアクチュエータ(動きを生み出す部品)、そして高度な制御システムが必要です。
センサーは、ロボットハンドが物の形状や重さ、表面の質感などを感知するのに役立ちます。センサーによって、ロボットはより繊細で正確な動作が可能になります。
ロボットハンドはプログラミングによって様々なタスクに対応できるように設定可能です。特定の作業を繰り返すだけでなく、新しい作業や複雑な問題解決にも対応できます。
例えば、製造ラインでの精密な部品の組み立てや、手術支援ロボットとしての使用、さらには災害現場での人命救助に至るまで、ロボットハンドの応用範囲は非常に広いです。
ロボットハンドは人間の手の動きを模倣し、それを超える能力を持つことで、作業効率を向上するだけでなく、ロボットハンドならではの作業も可能になるでしょう。
3種類のロボットハンドを解説

ロボットハンドは、使用する環境や取り扱う材料に合わせて多種多様な種類が用意されています。
大まかにロボットハンドの種類を知ることで、選定する際のあたりをつけることが可能です。
ここでは以下の代表的な3種類のロボットハンドについて解説します。
把持ロボットハンド
把持ロボットハンドは、物体を握る、または挟むことで把持するためのロボットハンドです。
一般的には、ひとつ以上の可動指を持ち、さまざまな形状やサイズの物体を掴むことができるように設計されています。
把持ロボットハンドは、精密作業から大きな物体の取り扱いまで、多様なタスクに応用可能です。
把持ロボットハンドが使われる業界・用途・目的
把持ロボットハンドは以下の目的を達成するために利用されます。
- 作業効率の向上:人手では困難な高速・高精度作業の実現
- 安全性の確保:人間にとって危険な環境での作業の代行
- コスト削減:労働力コストの削減と生産性の向上
また、把持ロボットハンドは以下の業界で利用されることが多いです。
- 製造業:自動車、電子機器、一般消費財の組み立てライン
- 医療:手術支援ロボットや実験用ロボットアームでのサンプル採取
- 農業:収穫ロボットなど、農作物の収穫や選別作業
把持ロボットハンドの強み
把持ロボットハンドの強みは以下の3点です。
- 多様性:異なる形状やサイズの物体を柔軟に扱える
- 精密さ:細かい作業が可能で、精密な位置決めやデリケートな物体の取り扱いが得意
- カスタマイズ性:用途に応じて、指の数や形状、材質などをカスタマイズ可能
把持ロボットハンドはさまざまな状況や目的に適応可能な点が強みといえるでしょう。
把持ロボットハンドの弱み
把持ロボットハンドの弱みは以下の3点です。
- 複雑性:複数の可動部分があり、設計や制御が複雑になりがち
- コスト:高度な機能性を持つため、製造コストが高い傾向がある
- メンテナンス:複雑な機構を持つため、メンテナンスが難しい。定期的な点検や調整も必要な場合がある
把持ロボットハンドはカスタマイズ性が高い分、設計やメンテナンスに手間がかかります。
コストも高い傾向があるため、費用対効果を見極めた利用が必要といえるでしょう。
把持ロボットハンドとほかのロボットハンドの使い分け方法
把持ロボットハンドは後述する吸着ロボットハンドや磁気ロボットハンドと比較して、さまざまな物体に利用できる汎用性の高いロボットハンドです。
特に複雑な形状の物体を扱う必要がある場合や、精密な操作が求められる作業に適しています。
一方、単純な形状の物体を高速で取り扱う場合は、吸着ロボットハンドや磁気ロボットハンドが適している場合があります。
把持ロボットハンドの使用例
把持ロボットハンドの中にもさまざまな種類があります。
以下の表では、3種類の把持ロボットハンドについて、概要と用途例について解説します。
| 種類 | 概要 | 用途例 |
|---|---|---|
| 二指グリッパー |
最も一般的なタイプのひとつ。 |
小さな部品のピックアンドプレース、 |
| 多関節グリッパー |
複数の関節を持つ指を使用して、 |
不規則な形状の物体の取り扱い、 |
| ソフトグリッパー |
柔らかい素材で作られ、 |
食品や生物学的サンプルの取り扱い、 |
※スマートフォンは横にスクロールできます。
吸着ロボットハンド
吸着ロボットハンドは、真空吸引を利用して物体の表面に吸着し、それを持ち上げるか、移動するためのロボットハンドです。
このタイプのハンドは、ひとつ以上の吸着カップを使用して物体に密着し、空気を抜いて真空を作り出し、物体を固定します。
吸着ロボットハンドが使われる業界・用途・目的
吸着ロボットハンドは以下の目的を達成するために利用されます。
- 作業の迅速化:高速で正確な物品の移動と配置
- 製品保護:表面を傷つけずに繊細な物品を扱う
- 作業の自動化:人手による取り扱いが難しい物品の自動化
また、吸着ロボットハンドは以下の業界で利用されることが多いです。
- 物流・倉庫:荷物の仕分けや梱包ラインでの貨物搬送
- 食品、薬品搬送:液体の入ったパウチの搬送作業
- 食品加工:食品のピックアンドプレースや包装作業
- 電子部品製造:基板上の部品の取り扱いや組み立て作業
吸着ロボットハンドの強み
吸着ロボットハンドの強みは以下の4点です。
- シンプルな構造:構造が単純で、高い信頼性と低いメンテナンスコストを実現
- 高速動作:物体を迅速に把持し、移動させられるため、生産性の向上が期待できる
- 柔軟性:平滑な表面を持つ様々な形状の物体に適用可能で、柔軟性が高い
- 非侵襲的把持:物体の表面を傷つけず、繊細な物体や食品なども安全に扱える
繊細で慎重な扱いが必要なものも、高速かつ傷つけることなく扱えるため、特定の領域で大幅な向上が期待できるでしょう。
吸着ロボットハンドの弱み
吸着ロボットハンドの弱みは以下の3点です。
- 表面依存性:表面が粗い、多孔質、または柔らかすぎる物体には適用できない場合がある
- 持続性の限界:吸着力は持続時間に限界があり、長時間の持ち上げには適さない
- 重量制限:吸着力には限界があり、特に重い物体を持ち上げるのには向かない
吸着ロボットハンドの用途はかなり限定されるため、使い所の見極めが大切です。特定の領域では低コストで高い効果が得られるため、適した作業では積極的に利用しましょう。
吸着ロボットハンドと他のロボットハンドの使い分け方法
吸着ロボットハンドは平滑な表面を持つ物体に特化しています。
迅速なピックアンドプレースが必要な場合や、非金属製の繊細な物体を扱う場合は吸着ロボットハンドを選択しましょう。
繊細な対象物が傷つくことを避けられるため、特定の業界で重宝されます。
吸着ロボットハンドの使用例
吸着ロボットハンドの中にもさまざまな種類があります。
以下の表では、3種類の吸着ロボットハンドについて、概要と用途例について解説します。
| 種類 | 概要 | 用途例 |
|---|---|---|
| 平面吸着 グリッパー |
平滑な表面を持つ物体を |
ガラス板や金属板の搬送、 |
| ベローズ吸着 グリッパー |
柔軟性のあるベローズ式の吸盤を使用し、 |
精密部品の取り扱い、 |
| 複数吸着 ポイント グリッパー |
複数の吸盤を持ち、 |
大きなサイズの物体の搬送、 |
※スマートフォンは横にスクロールできます。
磁気ロボットハンド
磁気ロボットハンドは、磁性を持つ物体を持ち上げる、移動する、または固定するために使用されるロボットハンドです。
永久磁石または電磁石を利用して物体に磁力を適用し、物体を把持することができます。
磁気ロボットハンドは、特に金属製の物体を扱う際に有効です。
磁気ロボットハンドが使われる業界・用途・目的
磁気ロボットハンドは以下の目的を達成するために利用されます。
- 効率的な物流:重量物の迅速かつ安全な搬送
- 安全作業の実現:重い物品を安全に扱うためのリスク軽減
- 資源の有効利用:リサイクルによる資源の回収と再利用の促進
また、磁気ロボットハンドは以下の業界で利用されることが多いです。
- 金属加工業:鋼板や金属部品の持ち上げや移動
- リサイクル:金属廃材の選別や移動
- 建設業:鉄骨の移動や組み立て作業
磁気ロボットハンドの強み
磁気ロボットハンドの強みは以下の4点です。
- 強力な把持:磁力による強力な把持能力を持ち、重い金属製の物体も容易に扱える
- 非接触把持:物体との直接的な接触がないため、表面を傷つけるリスクが低い
- 操作の簡便性:電磁石を使用する場合、電源のオン/オフで簡単に把持や解放を行える
- メンテナンスの容易さ:動く部品が少ないため、メンテナンスが比較的簡単
磁力を利用するため、ほかのロボットハンドと異なる動きが可能になります。
直接触れずに運ぶ、磁力の調整で物体の把持や解放の選択が可能など、唯一無二の動きができる点を活かすことで高い効果を発揮するでしょう。
磁気ロボットハンドの弱み
磁気ロボットハンドの弱みは以下の3点です。
- 材質の限定性:非金属製や一部の金属製の物体には使用不可
- 脱磁の必要性:金属を吸着後に磁気が残ることがあり、異物付着や測定・加工制度を維持するために脱磁が必要
- 磁場の影響:使用環境によっては、磁場が他の機器に影響を与える可能性がある
- 電力消費:電磁石を使用する場合、継続的な電力消費が問題となる場合がある
磁力を利用するため、利用できる範囲がかなり限定されます。電力の消費も問題になることがあるため、磁力を用いた動作が必須か否かを判断した上で利用すべきでしょう。
磁気ロボットハンドとほかのロボットハンドの使い分け方法
磁気ロボットハンドは重量がある金属製の物体を扱う場合や、表面を傷つけたくない場合に磁気ロボットハンドが適しています。
自動車産業の製造ラインや金属加工業での使用、またリサイクル工程での金属材料の選別など、特定の産業かつ特定の用途において、磁気ロボットハンドはほかのタイプのロボットハンドよりも優れた選択肢です。
磁気ロボットハンドの使用例
磁気ロボットハンドの中にもさまざまな種類があります。
以下の表では、3種類の吸着ロボットハンドについて、概要と用途例について解説します。
| 種類 | 概要 | 用途例 |
|---|---|---|
| 永久磁石 グリッパー |
永久磁石を使用して |
金属部品の取り扱い、 |
| 電磁 グリッパー |
電力を供給し磁力を発生させ、 |
電力のオン/オフで |
| プログラマブル 磁力 グリッパー |
磁力の強さやパターンを |
精密な金属部品の取り扱い、作業に応じて |
※スマートフォンは横にスクロールできます。
ロボットハンドの活用事例
食品・物流などの分野では、ロボットハンドが人手不足解消や品質安定に寄与しています。本章では、各業界でよく見られる代表的な活用ケースを紹介します。
食品加工・包装ライン
- よくある課題
- 導入目的
- 採用されるロボットハンド
- 期待されるメリット
形状が不規則で壊れやすい食品を高速処理すると破損しやすい
多品種少量生産でも品質保持と衛生基準を両立する自動化
食品衛生対応のシリコン製ソフトグリッパー
破損率低減と段取り替え時間短縮で稼働率が向上
ソフトグリッパーは製品保護と段取り替えの容易さを兼ね備え、食品ラインでの自動化に適しています。
物流倉庫ピースピッキング
- よくある課題
- 導入目的
- 採用されるロボットハンド
- 期待されるメリット
SKUが多く繁忙期に人手作業によるピッキングミスが増加
高スループットで24時間稼働する仕分けラインの実現
AIビジョンと連携する真空吸着ロボットハンド
処理速度向上と誤出荷防止により物流品質が安定
真空吸着ロボットハンドは多品種混在環境でも高速で確実に商品を把持でき、EC物流の自動化を支えています。
EVバッテリー組立
- よくある課題
- 導入目的
- 採用されるロボットハンド
- 期待されるメリット
セル間隔や締結トルクを厳密に管理する手作業が難しい
高精度・高再現性の組立で歩留まりと品質を向上
トルクセンサ内蔵マルチフィンガーグリッパー
組立品質の安定と再検査工程の削減によるコスト最適化
力覚センサ統合型グリッパーは高精度位置決めと締結管理を同時に行え、EV生産ラインの品質確保に貢献します。
6つの選定基準|ロボットハンドの選び方
ロボットハンドの選定では、多くの要素を考慮すべきです。
この記事では、ロボットハンドの選定で必要な以下6つの要素について解説します。
- 対象物の重さ
- 対象物の材質・形状・表面の状態
- 対象物の硬さ・柔らかさ
- 対象物の耐久性
- ロボットハンドの作業速度と制御精度
- ロボットハンドを使用する環境条件
※クリックすると該当箇所へ飛びます
考慮すべき要素が多く、選定に手間がかかりますが、ロボットの性能を最大化するためには必須事項のため、最後までご確認ください。
対象物の重さ
扱う対象物の重量に合わせて最適なロボットハンドの選定が必要です。
重量が重い、軽いの定義は、ロボットハンドの適用範囲や能力、作業環境によって異なります。
具体的な対象物の例としては、以下を参考にしてください。
| 重い対象物の例 |
エンジンや車のドアなど、大型で重量のある金属部品 |
|---|---|
| 軽い対象物の例 |
エンジンや車のドアなど、大型で重量のある金属部品 |
※スマートフォンは横にスクロールできます。
注意点としては、軽対象物は繊細に取り扱いが必要な商品という点です。
重い対象物を扱うロボットハンドは、精密な動きよりも、力の強さを重視する傾向があります。そのため、重い対象物を扱うロボットハンドを選定すれば安心、という考えは危険です。
例えば、把持ロボットハンドの中にも、重いものを扱うための商品と、繊細なものを扱うための商品が用意されています。
対象物に適したロボットハンドを選定しましょう。
対象物の材質・形状・表面の状態
扱う対象物の材質や形状、表面の状態によって使用すべきロボットハンドは異なります。
具体的な対象物の例としては、以下を参考にしてください。
| 対象物の材質 | 用途 |
|---|---|
| 金属 | 機械部品や自動車部品 |
| プラスチック | 電子機器のケース |
| ガラス | スマホの画面パネル |
※スマートフォンは横にスクロールできます。
| 対象物の形状 | 用途 |
|---|---|
| 不定形 | 食品、生物学的サンプル |
| 薄型 | ガラス板、金属シート |
※スマートフォンは横にスクロールできます。
| 対象物の表面の状態 | 用途 |
|---|---|
| なめらか | 鏡、スマホの画面パネル |
| 粗い | 石材、粗加工された金属 |
| 柔らかい | 食品、衣類 |
※スマートフォンは横にスクロールできます。
材質や形状、表面の状態を無視して選定した場合、対象物とロボットハンド双方に問題が生じます。
例えば、先述した吸着ロボットハンドの場合、対象物が平滑かつ軽量の時に利用可能です。
一方で把持ロボットハンドを利用した場合、対象物が曲がり平滑さを維持できない可能性があります。
さらに、持ちにくい材質を無理に持たせる場合、把持ロボットハンドの劣化を早める可能性もあるでしょう。
特に取り扱いに繊細さを求める場合、適したロボットハンドの選定は必須です。
対象物の硬さ・柔らかさ
硬い物体やワークの硬さは、材料科学において一般的に硬度として測定されます。
硬度は、材料が他の物体によって変形されるか、または抵抗する能力を示す指標です。
例えば、金属のような人の手で曲げることが困難な対象物もあれば、生鮮食品のように、人の手でも簡単に形状を変えられる対象物もあります。
具体的な対象物の例としては、以下を参考にしてください。
| 硬い対象物の例 |
高硬度の鋼や合金製の部品などの金属 |
|---|---|
| 柔らかい対象物の例 |
クッキーやチョコレートのような食品 |
※スマートフォンは横にスクロールできます。
硬い対象物であれば、繊細な動きよりも力を重視した方が安全です。
一方で柔らかい対象物を硬いものと同じように扱えば、傷がつくことは避けられません。
材質や形状と同様に、対象物の特性に合わせたロボットハンドの選定が必要です。
対象物の耐久性
硬度と似た要素に耐久性と呼ばれる要素があります。
耐久度が高いワーク素材は、一般的に高い硬度、高い引張強度、および高い耐摩耗性が特徴です。
一方で耐久度が低いワーク素材とは、一般に物理的、化学的、または熱的ストレスに対して低い耐性を持つ素材を指します。
具体的な対象物の例としては、以下を参考にしてください。
| 耐久性の高い 対象物 |
高硬度の鋼や合金製の部品などの金属 |
|---|---|
| 耐久性の低い 対象物 |
パンやフルーツのような圧力や摩擦に弱い食品 |
※スマートフォンは横にスクロールできます。
使用する環境や、対象物の取り扱い条件によっては、硬度だけでなく耐久性まで留意した選定が必要になるでしょう。
ロボットハンドの作業速度と制御精度
作業速度が特に重要な要素となる場合、迅速に物体を把持し移動させることが可能なロボットハンドが最適です。
高速での作業に適したロボットハンドは、軽量で反応速度が高く、繰り返し精度が良い特性を持っている必要があります。
一方、遅い作業速度が必要な場合、精密さや繊細な操作性が求められることが多く、精度と制御のしやすさに優れたロボットハンドが最適です。
遅い速度で繊細さが求められる場合、操作の正確性や物体を優しく取り扱える特性を持つロボットハンドと相性が良いです。
ロボットハンドを使用する環境条件
ロボットハンドは使用する環境によって、性能や耐久性に大きな影響があります。
ロボットハンドを選定する上で特に注意すべき要素は以下の3つの要素です。
- 周辺温度
- 相対湿度
- 電波妨害(磁気ロボットハンドの場合)
それぞれの要素について、一般的なロボットハンドで利用可能な条件を解説します。
| 要素 | 適切な条件 | 避けるべき条件 |
|---|---|---|
| 周囲温度 |
0℃から45℃の範囲 |
極端に高温(45℃以上) |
| 相対湿度 |
40%から60%の範囲 |
高湿度(80%以上) |
| 電磁妨害 |
強力な電磁場から離れた場所 |
高電圧の設備や強力な無線信号を発する装置の近くの場所 |
※スマートフォンは横にスクロールできます。
これらはロボットハンドだけでなく、ロボット全体に対して当てはまる内容です。
避けるべき条件での動作を求める場合、ロボット全体を特殊な環境で使用できる仕様に変更する必要があるため注意しましょう。
ロボットハンドを製造しているオススメのメーカー・販売代理店を紹介

それぞれ得意としている商品や業界が異なるため、用途に適したメーカーを選びましょう。
JET-Roboticsでは、ロボットハンドを活用した工場の自動化支援も行っております。
ロボットの導入成功まで専門家がサポートいたします。相談は無料ですので、ぜひ以下よりサービス詳細をご覧ください。
-
【メーカー】
- クリエイティブテクノロジー / Creative Technology
- 近藤製作所 / KONSEI
- シナノケンシ / Shinano Kenshi
- シュンク / SCHUNK
- シュマルツ / Schmalz
- ピアブ / Piab
- フィンガービジョン / FingerVision
- 富士精工 / FUJI SEIKO
- シーケーディー / CKD
- OnRobot / オンロボット
※クリックすると該当箇所まで飛びます
-
【代理店】
- IZUSHI / イズシ
※クリックすると該当箇所まで飛びます
ロボットハンドを製造するメーカー
クリエイティブテクノロジー / Creative Technology
| 会社名 | クリエイティブテクノロジー / Creative Technology |
| 設立年 | 1985年 |
| 本社 | 神奈川県川崎市高津区上作延1-11-33 |
| 概要 | 静電チャックおよび周辺技術の開発・製造・販売 その他吸着物搬送機器の開発・製造・販売 静電チャック用電源およびセンサーの開発・製造・販売 |
クリエイティブテクノロジーは、静電チャックのパイオニアです。独自の静電吸着技術を応用したロボットハンドにより、多様な現場の自動化を支援します。DOBOT正規代理店として、ロボット単体から搬送ツールとの組み合わせまで、最適なソリューションを提供します。
「静電吸着式ハンド」はワーク全体を均一に把持し、薄物やデリケート素材もダメージレスに搬送可能です。バキュームが効かないメッシュ素材にも有効で、サイズ・材質を問わず幅広く対応します。扱いやすいDOBOT CRAシリーズと組み合わせることで、手軽に自動化を実現します。
リチウムバッテリー製造工程の電極シート搬送では、折れ・シワ・剥がれを防止。車体製造現場では、ガラスファイバー系不織布搬送時にサイズ・素材違いで発生していた段取り替え時間を削減し、バキュームで頻発した二重取りも防止しました。現場に最適な吸着搬送をご提案しますので、どうぞお気軽にご相談ください。
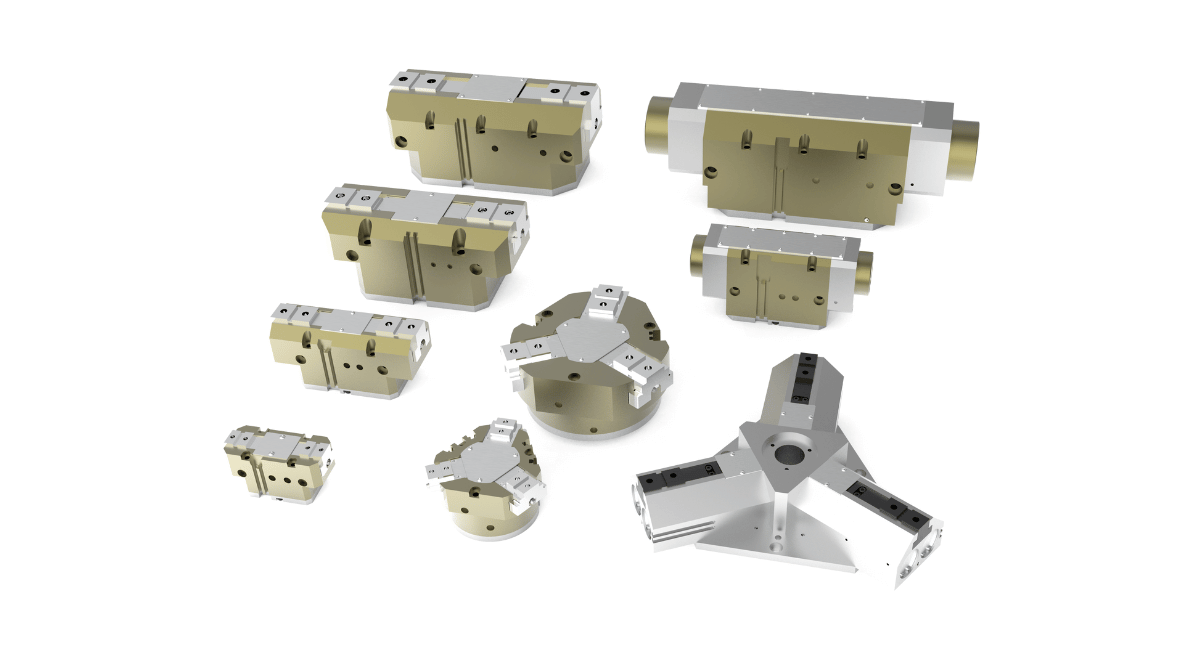
近藤製作所 / KONSEI
| 会社名 | 近藤製作所 / KONSEI |
| 設立年 | 1956年 |
| 本社 | 愛知県額田郡幸田町深溝一本樹11-1 |
| 概要 | 自動化・省力化のシステムアップのサポートなど |
近藤製作所は自動車部品の量産加工から始まり、その製造現場の自動化を進めてきたノウハウがある会社です。現場のニーズに即したロボットハンド・ロボット周辺機器の提案が可能です。
ロボットハンドとして、日本国内メーカー唯一の「大型ハンド&チャックシリーズ」や、協働ロボットにPlug&Playが可能な「協働ロボット用エアーハンド&チャック」などを展開しています。大型ハンド&チャックシリーズは、最大把持力20,000Nの高把持力が特徴です。協働ロボット用エアーハンドは、協働ロボットに直接取り付けが可能です。
用途に合わせたオーダーメイド対応も可能です。詳しくはお問い合わせください。
シナノケンシ / Shinano Kenshi
| 会社名 | シナノケンシ / Shinano Kenshi |
| 設立年 | 1918年 |
| 本社 | 長野県上田市上丸子1078 |
| 概要 | 精密小型モータおよび関連製品の開発・製造・販売 |
シナノケンシは、日本の精密モーターの製造を主軸とする企業です。
1918年に設立され、特にステッピングモーターやサーボモーターの分野で高い技術力と製品品質を誇ります。
シナノケンシのロボットハンドは、産業用ロボットから医療、福祉用途まで幅広い分野で利用されています。
イノベーションと顧客ニーズへの応答を重視しており、グローバルに事業を展開している点が特徴です。
シュンク / SCHUNK
| 会社名 | シュンク / SCHUNK |
| 設立年 | 2009年(日本) |
| 本社 | 東京都品川区南品川2-2-13 南品川JNビル1F(日本本社) |
| 概要 | シュンク社製品の輸入販売、グリッピングシステム製品の製造および販売(日本) |
シュンクは主に自動化技術を提供する、ドイツに本拠地を置く企業です。日本には東京都品川区、大阪府東大阪市、愛知県小牧市に営業所が存在します。
1945年に創業され、8ヵ所の工場、34の子会社や販売パートナーなど、世界50ヵ国以上に対してネットワークがあります。
シュンクのロボットハンドラインナップには、高度なツールホルダー、安定性と信頼性を兼ね備えたワークホルダー、そして先端のグリッピング技術が含まれています。
類をみない堅牢、高剛性、高精度、ワイドレンジの商品群、柔軟なカスタマイズソリューションがシュンクの魅力であり、高い評価の源です。
シュンクについて更に知りたい方は、ぜひ以下のボタンから記事を読んでみてください。
シュマルツ / Schmalz
| 会社名 | シュマルツ / Schmalz |
| 設立年 | 2002年(創業) |
| 本社 | 神奈川県横浜市都筑区大棚町3001-7(日本本社) |
| 概要 | 搬送用ロボットや装置に使用される真空吸着機器や固定用真空吸着機器の販売など |
シュマルツは、ドイツに本社を置く真空技術を中心とした産業機器のリーディングカンパニーの日本法人です。
真空コンポーネント、真空ハンドリングシステム、真空クランプ技術など、幅広い製品ラインナップを持ち、特に真空を利用したハンドリングソリューションでは世界的に認知されています。
ロボットハンドに関しては、真空吸着式のグリッパーを提供しており、軽量から重量級の物体まで幅広いワークの取り扱いに適しています。
シュマルツは、その環境に優しい製品とソリューションで、グローバルな市場において持続可能な製造プロセスを支援している点が特徴です。
ピアブ / Piab
| 会社名 | ピアブ / Piab |
| 設立年 | 1951年 |
| 本社 | スウェーデン・タビー |
| 概要 | ワークの把持、吊り上げ、搬送に特化したコンポーネントおよびソリューションの提供 |
ピアブは、産業用真空ポンプやサクションカップといった製品に強みを持っており、自動車製造、食品加工、物流など、幅広い産業分野で自動化ソリューションを提供しています。
同社は主に真空ポンプや真空生成器の製造・販売のほかに、ロボットハンドでは真空技術を活かして真空工藤ソフトグリッパーを扱っています。
ピアブのロボットハンドは、高い柔軟性と性能さが評価されており、様々な産業分野で採用されています。
フィンガービジョン / FingerVision
| 会社名 | フィンガービジョン / FingerVision |
| 創立年 | 2021年 |
| 本社 | 東京都江東区東陽2-4-14 三井ウッディビル1F |
| 概要 | コンポーネントビジネス(触覚センサ、ロボットハンドなど)やアプリケーションビジネス(ロボットシステムなど) |
フィンガービジョンは、触覚センサやロボットハンドなどのコンポーネントビジネスやロボットシステムなどのアプリケーションビジネスを事業として取り組んでいるメーカーです。
触覚センサFingerVisionを搭載したロボットシステムを、業界の課題に合わせて開発・導入を進めることを軸にしながら、視触覚センサ内蔵グリッパセットの販売なども行っています。
視触覚センサ内蔵グリッパセットは、「滑り分布」(対象物自体を認識し、その対象物がカメラと相対的に動く状態を滑りとして認識)と「力分布」(センサ表面がドットマーク配置のシリコンのスキンで覆われ、その移動量と方向・大きさから画像処理によって力の分布を推定)により、様々なワークのハンドリングが可能なロボットハンドです。
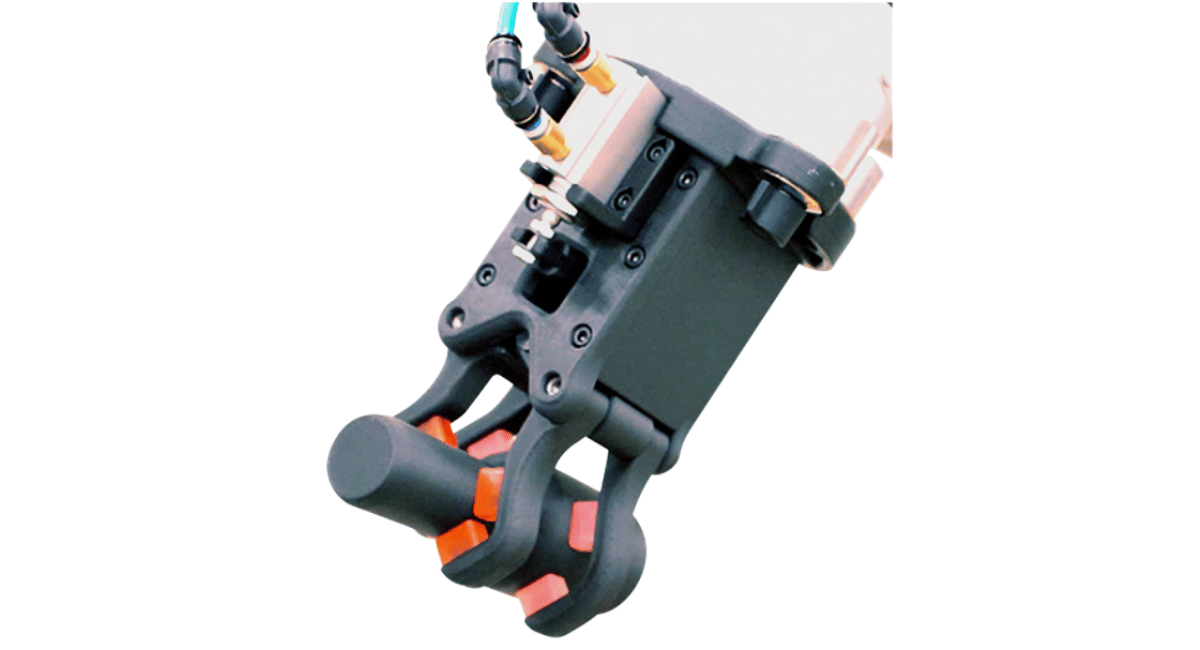
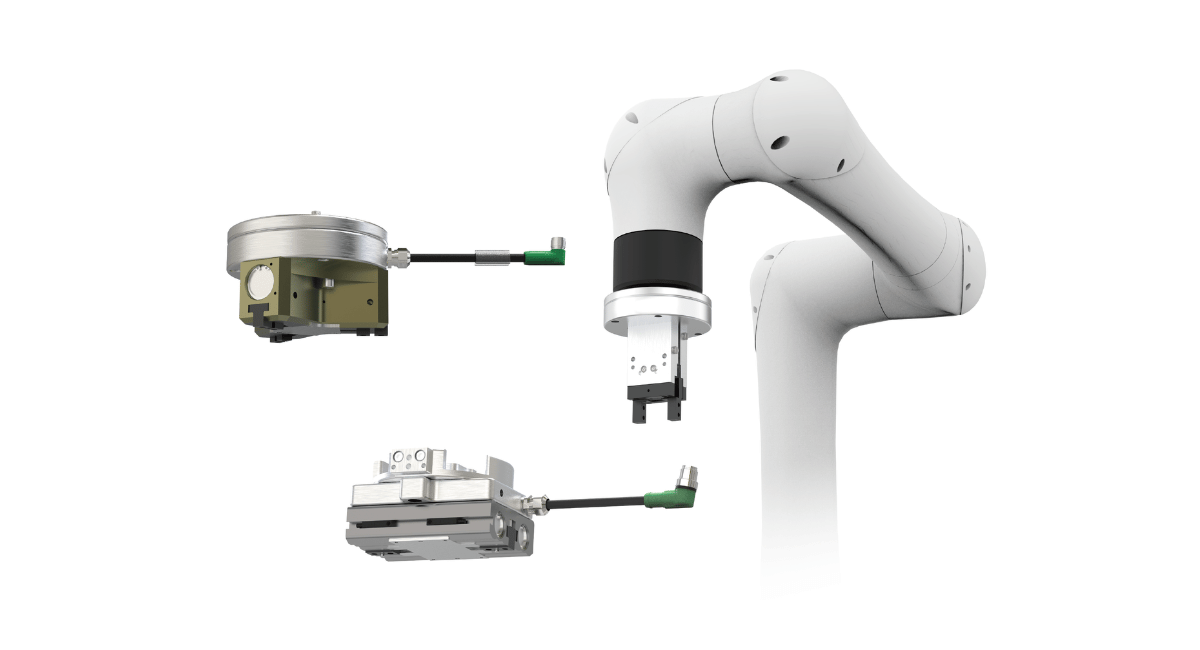
富士精工 / FUJI SEIKO
| 会社名 | 富士精工 / FUJI SEIKO |
| 創立年 | 1958年 |
| 本社 | 愛知県豊田市吉原町平子26番地 |
| 概要 | 超硬工具、ダイヤモンド工具、その他切削工具、工具保持具及び治具の製造販売、産業用機械設備及びその部品並びに附属品の製造販売など |
富士精工は工具に関わるあらゆる仕事をサポートするツールエンジニアリングカンパニーとして、ドイツのマイスター制度にならって「日本一(富士)精密工具(精工)をつくる」という志のもと、創業以来精密工具分野における「ものづくり」を通じて、産業界や地域社会の発展に貢献しています。
ロボットハンドは「搬送ハンド」を取り扱っています。「軽量素材」+「造形技術」でワークにフィットするハンド形状を実現し、軽量化と自由度を追求しました。構成部品にはCFRPの積層造形品を採用しており、高い強度重量比を有しています。また、ハンド形状はワークに合わせて自由自在にカスタマイズが可能です。
協働ロボット用搬送ハンドとして、自由自在にカスタマイズが可能なことから、多種多様なワーク搬送の自動化を実現します。90%オーダーメイドで作成しており、ワークに応じたエンドエフェクタをご提案します。詳しくはお問い合わせください。
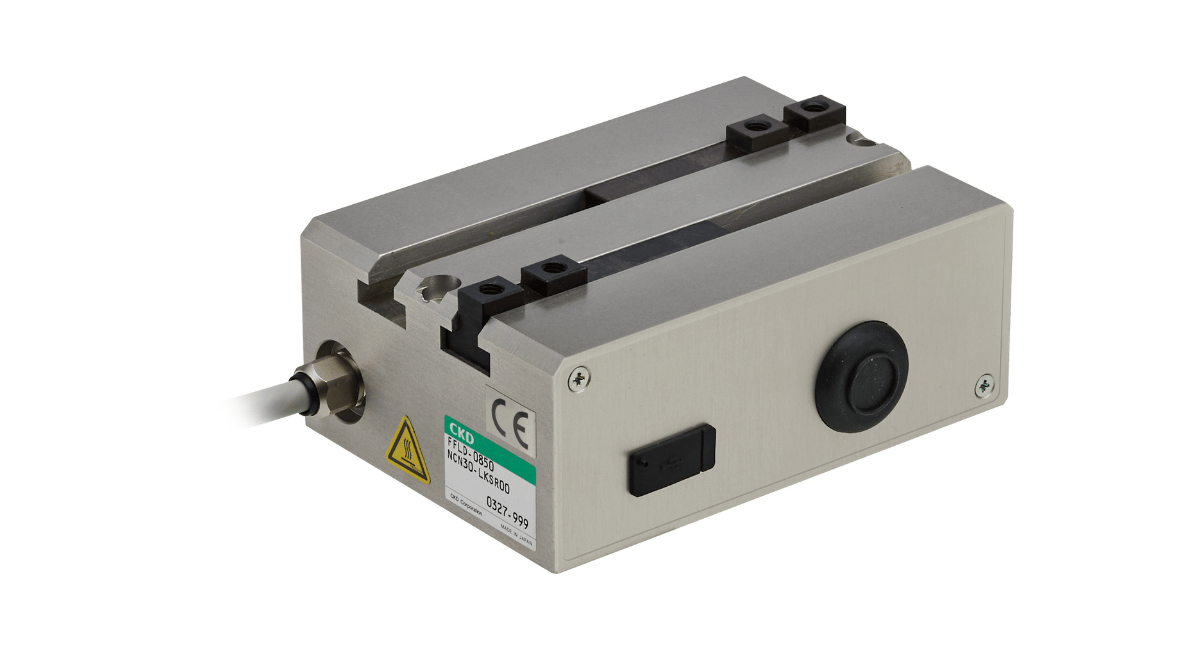
シーケーディー / CKD
| 会社名 | シーケーディー / CKD |
| 設立年 | 1943年 |
| 本社 | 愛知県小牧市応時二丁目250番地 |
| 概要 | 自動機械装置、駆動機器、空気圧制御機器、空気圧関連機器、液体制御機器など機能機器の開発・製造・販売・輸出 |
シーケーディーはお客様と共に、モノづくりの課題を解決し続けてきた会社です。現在50万点を超える自動化商品とサービスを生み出し、モノづくりを通して世界中の人々の暮らしを支えています。そして、創造性と革新性をもって自動化技術の探究と共創を続け、健やかな地球環境と豊かな未来を拓いくことを目指しています。
ロボットハンドとして、「FFLDシリーズ」を展開しています。ロボット先端に最適なロングストローク&薄型タイプの電動グリッパです。把持位置を任意に設定可能なため幅広いサイズの多品種ワークをツールチェンジすることなく把持できます。
組立、ハンドリング、検査などの用途に使用可能です。詳しくはお問い合わせください。
OnRobot / オンロボット
| 会社名 | OnRobot / オンロボット |
| 設立年 | 2018年 |
| 本社 | デンマークオーデンセ |
| 概要 | 産業用ロボットおよび協働アプリケーション向けのハードウェアならびにソフトウェアソリューションのプロバイダー |
OnRobotは自動化の障壁を打破し、あらゆる規模の製造業者にロボットによる自動化メリットをもたらすことを目指している会社です。OnRobotの製品とソリューションは700を超える流通およびシステム統合パートナーを通じて提供され、さまざまな業界で使用されています。
ロボットハンドは「Soft Gripper」「MG10」「RG2/RG6」「GECKO GRIPPER」「3FG25」などを展開しています。たとえばSoft Gripperは柔軟なシリコン形成グリッパーで、幅広いイレギュラーな形やデリケートな物体も簡単に扱えるのが特徴です。特に飲食物オートメーションに強く、高品質な生産で廃棄物を減らせます。
OnRobotの製品はパレタイジング、CNCマシン、包装、ピックアンドプレース、研磨、ねじ締めなどの作業をより簡単かつ迅速に自動化することができます。中小規模の製造業者がプロセスを最適化し、高い柔軟性、高い生産量、優れた品質でビジネスを成長させるお手伝いをしているのがOnRobotです。
ロボットハンドを販売する代理店
IZUSHI / イズシ
| 会社名 | IZUSHI / イズシ |
| 設立年 | 1910年 |
| 本拠地 | 京都府京都市左京区古川町通三条上ル東門前町518番地 |
| 概要 | ロボット機器、工作機械、機械工具等の販売 |
IZUSHIは京都に本社を置く創業100年以上の商社で、もともとは機械工具製品の扱いが中心でしたが、昨今の自動化・工程集約の需要に伴い設備・ロボット機器の取り扱いにも力を入れています。また、海外メーカーにも目を向け、特徴的な性能を持つメーカーを積極的に取り入れ、総代理店という立場でさまざまソリューションを提供しています。
2024年から新たに「フォームハンド」の取り扱いを開始し、日本で唯一の代理店として活動しています。フォームハンドはドイツのメーカーで、製品はハンドの先端が多数のビーズを内包したクッション形状をしており、対象物の表面を習うように吸着します。吸着時のバキューム圧によりビーズ同士が密着することで、高いグリップ力を発揮します。
多様な形状・材質に対応できる点で、汎用性が求められる現場において高い評価を受けています。ハンドのみの販売も、エアツール全般のセット販売も行っているため、詳しくはお問い合わせください。
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。