ロボット周辺機器
- JET-Robotics
ロボット周辺機器全製品(30件)






| 製品 | 詳細情報 |
|---|---|
|
486人が閲覧しました
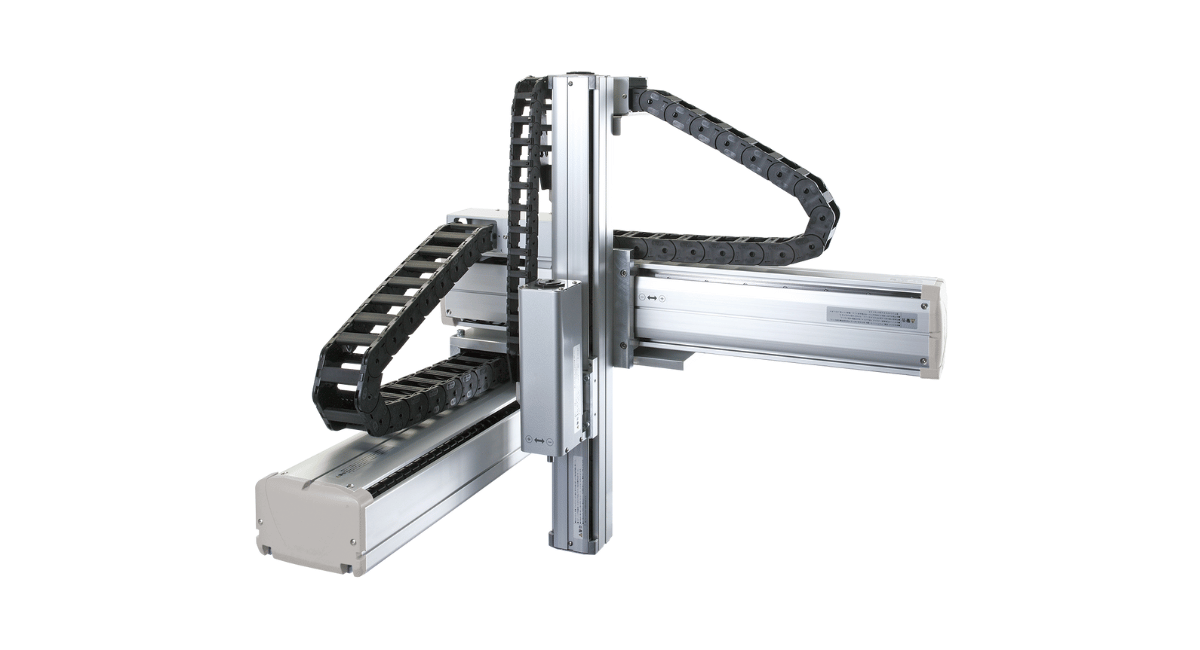
カタログあり 特徴:サーボモータ駆動の単軸・多軸に対応した電動アクチュエータ 構成部品の自在組合せにより、あらゆる搬送シーンに適合 用途事例は組立や搬送、塗布装置など JET-Roboticsに問い合わせる |
|
|
477人が閲覧しました
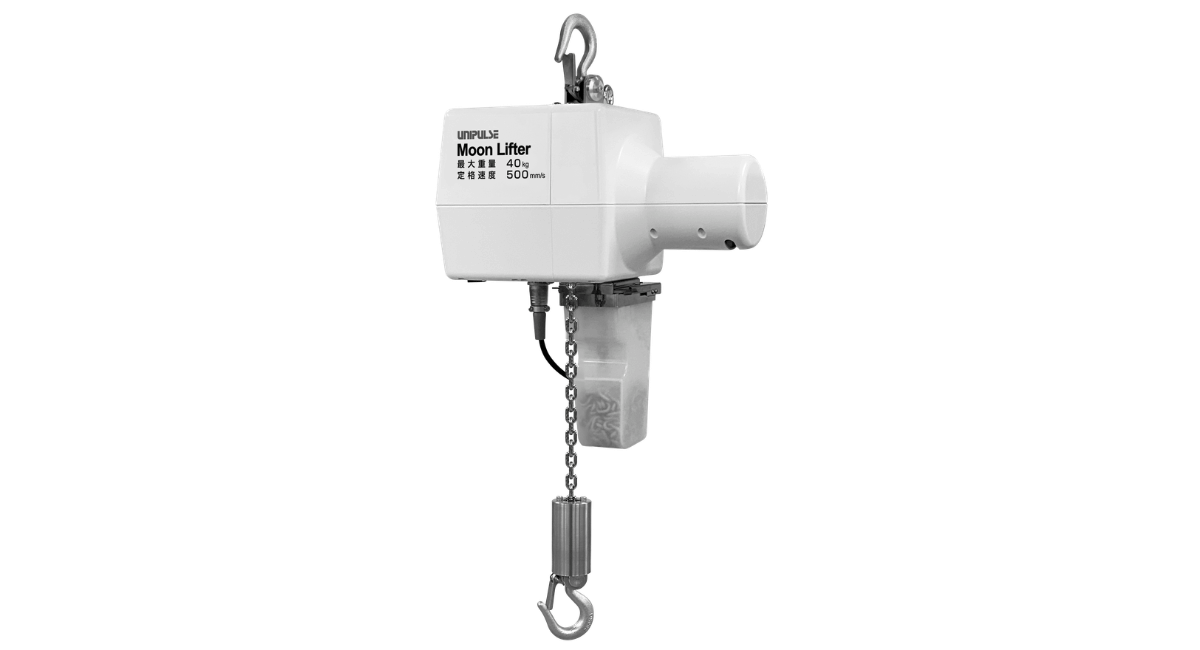
カタログあり 特徴:10kgから1トンまでの重量物を吊上げ、スマホを持ち上げる程度の軽い力で扱えるようにするパワーアシスト装置 ボタン操作は不要。持ち上げた瞬間に重量を検知しその重さ分アシストする。誰でも直感的に使いこなせる ロボットアームのサポートも可能。例えば10kg可搬の協働ロボットで100kgの重量物を安全柵なしで搬送できる JET-Roboticsにお問い合わせ |
|
|
454人が閲覧しました
メーカー:シナノケンシ株式会社特徴:把持力110Nで3kg程度のものをやさしくつかめ、開口幅も73mmと大きいため、様々なワークの把持が可能 電源が落ちても機械的に保持するため、不意の停電でもワークの落下を防ぐ トルク、位置、速度など細かな把持力調整が可能なため、たとえば部品把持もできる |
|
|
443人が閲覧しました
カタログあり 特徴:ロボット先端に最適なロングストローク&薄型タイプの電動グリッパ 把持位置を任意に設定可能なため、幅広いサイズの多品種ワークをツールチェンジすることなく把持 用途事例は組立、ハンドリング、検査など JET-Roboticsに問い合わせる |
|
|
439人が閲覧しました
メーカー:モーションリブ株式会社特徴:「加減が伝わる×感触を感じる」属人作業を解放する人スキルの簡単ティーチング リーダー/フォロワーの2台のユニバーサルロボットをURHで接続し、互いの動き・トルクをリアルタイムに同期させることで、離れた場所の「感触」「力加減」をリアルに伝え合うことが可能(写真2枚目) ロボットを遠隔操作したときの動作データ(位置・速度・力)を抽出して記録ができるため、熟練作業動作の解析に使用したり、ロボットに同じ動作・力を再現させて自動化が可能(写真3枚目) URHは外付けのシステムであるため、ユニバーサルロボットに簡単に導入ができる 危険環境・クリーン環境の遠隔化や離れた拠点間での移動コスト削減が活用シーン例 JET-Roboticsにお問い合わせ |
|
|
432人が閲覧しました
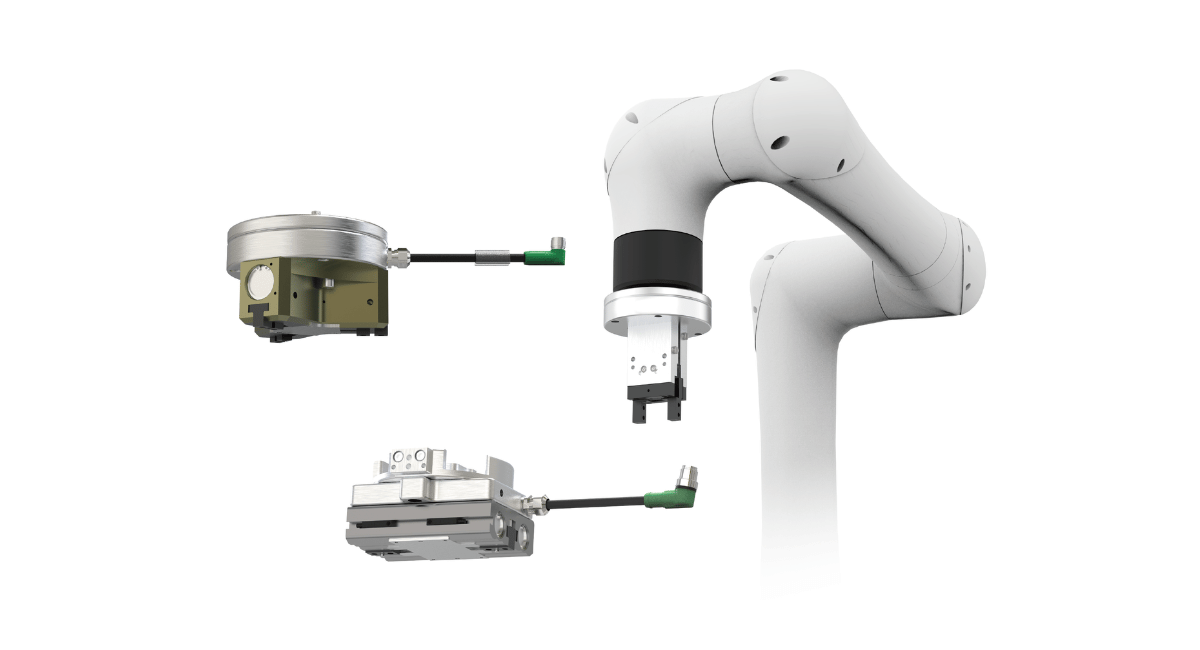
メーカー:株式会社近藤製作所特徴:協働ロボットに直接取り付け可能 センサとバルブの制御はロボットのティーチングペンダントで簡単制御 クロスローラ2爪、薄型2爪、薄型3爪の3機種をラインナップ JET-Roboticsに問い合わせる |
|
|
425人が閲覧しました
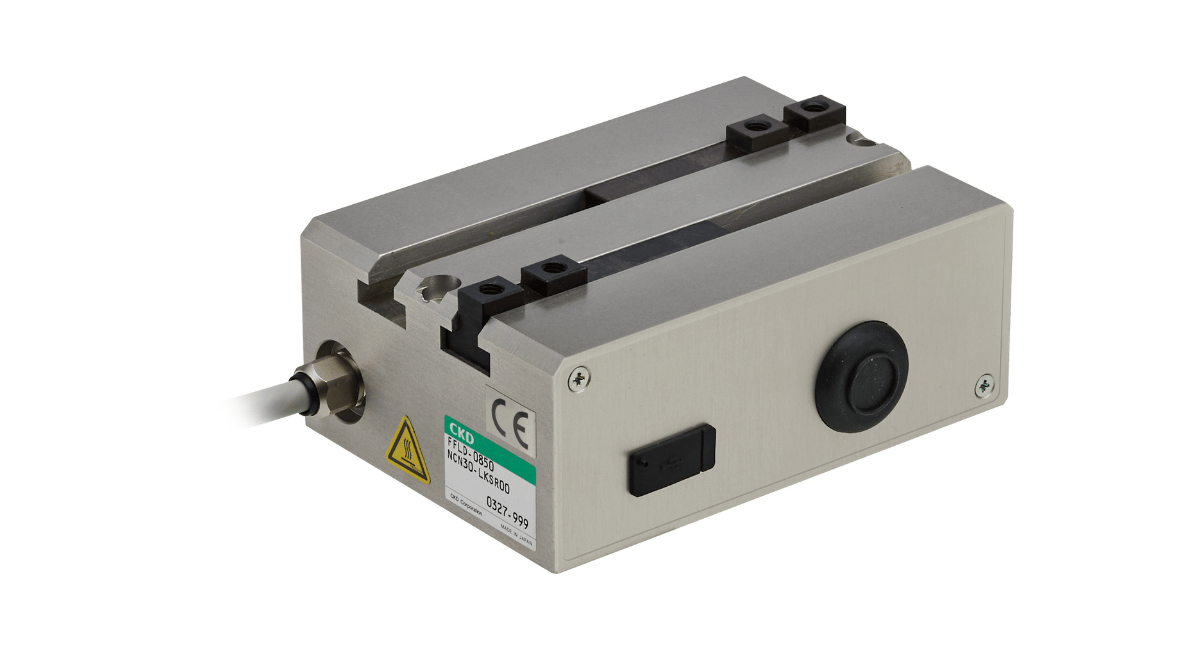
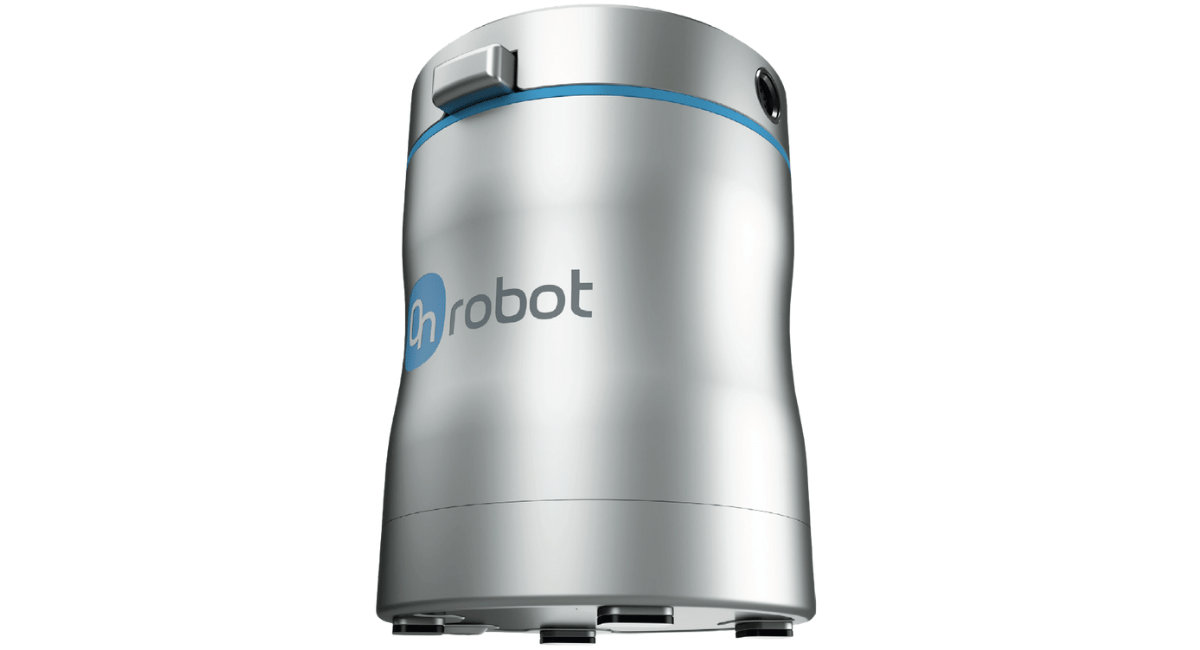
カタログあり 特徴:複雑でコストのかかる外部給気を必要としない、即導入可能な電動磁気グリッパー 部品検出と力調整が容易にできる内蔵型インテリジェンスにより、さまざまなサイズや重量の部品に確実に対応 あらゆる用途のニーズに対応する、コンパクトでカスタマイズ可能な高速グリッパー |
|
|
423人が閲覧しました
メーカー:トークシステム株式会社特徴:直線移動のクランプ・アンクランプを力を入れずにワンタッチで行えるロック機構です。 エアを供給するとシャフトをアンクランプ、遮断するとシャフトをクランプします 固定の間、電気・エアの動力不要(カラクリ機構採用) 両端のリニアプッシュにより、かんたんにユニット化が可能 動作保証は50万回、摩耗ほぼなし ならいユニットの機構に用いれば、1ユニットで複数のワークを扱えるロボットハンドを製作可能。吸着(写真2枚目)・搬送・把持(写真3枚目)(写真の2枚目、3枚目に使用しているのはクイッククランパーエレメントです) |
|
|
417人が閲覧しました
メーカー:シナノケンシ株式会社特徴:把持力5Nで300g程度のものをやさしくつかめ、ストロークもΦ143と大きいため、様々なワークの把持が可能 ハンド中心に穴が開いた中空構造でカメラやセンサを使うなど、構造を活かしたカスタマイズが可能 トルク、位置、速度など細かな把持力調整が可能なため、たとえば饅頭のパレタイジングもできる |
|
|
409人が閲覧しました
カタログあり 特徴:古い機械やメーターをカメラでデータ化する製品。データ化したい対象機器をカメラで撮影、撮影した画像を解析してデジタルデータに変換、デジタルデータをCSVやPLCなどへ出力 アナログメーターやデジタルメーター、ランプ、文字、QRコードなど、カメラ1台あたり20個まで同時認識可能 設定ソフトで認識する場所をマウスで自由に設定可能。またマーカーによる自動補正機能やWebブラウザでの遠隔監視機能、メールの通知機能などが使用可能 JET-Roboticsにお問い合わせ |
|
|
404人が閲覧しました
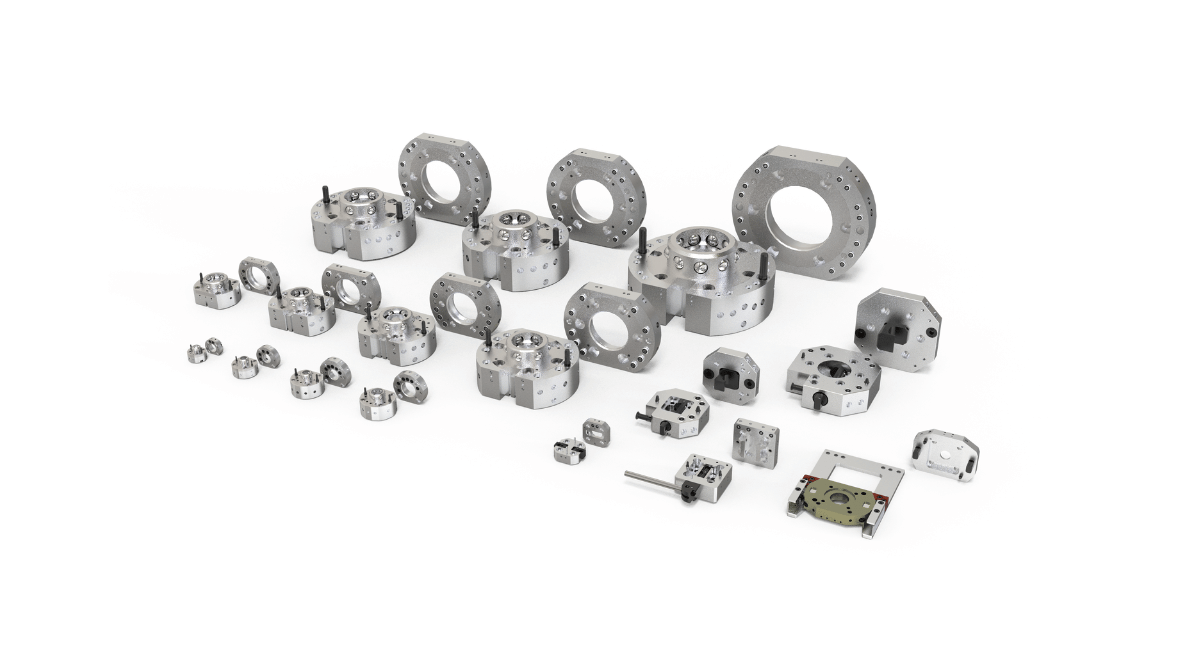
メーカー:株式会社近藤製作所特徴:1~300kg可搬をラインナップ 人の手で交換する手動ツールチェンジャーやロボットのスライド動作で交換するメカチェンジャーをラインナップ 電極、増設エアーポートを多数ラインナップ JET-Roboticsに問い合わせる |
|
|
400人が閲覧しました
カタログあり 特徴:低反力・高出力で小型協働ロボット※1にも接続可能 締付作業データー(トルク値、波形、作業時間など)を無線で記録可能 無線通信制御で「ボルトかじり検出」※2など、各種作業アシスト機能の設定が可能 ※1:ブラケットの形状、締付条件によって対応できるロボットは異なるため、実作業での事前確認が必要です。 ※2:実際の作業では、周囲条件(締付ボルト・部材・固定方法等)により、変化します。実作業での事前確認が必要です。 |
ロボット周辺機器のカタログ(13件)
最新のダウンロード
導入などでお困りでしたら以下からお気軽にご相談ください。
JET-Roboticsに問い合わせる
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。