ロボット周辺機器
- JET-Robotics
ロボット周辺機器全製品(28件)








| 製品 | 詳細情報 |
|---|---|
|
🏆注目
102人が閲覧しました
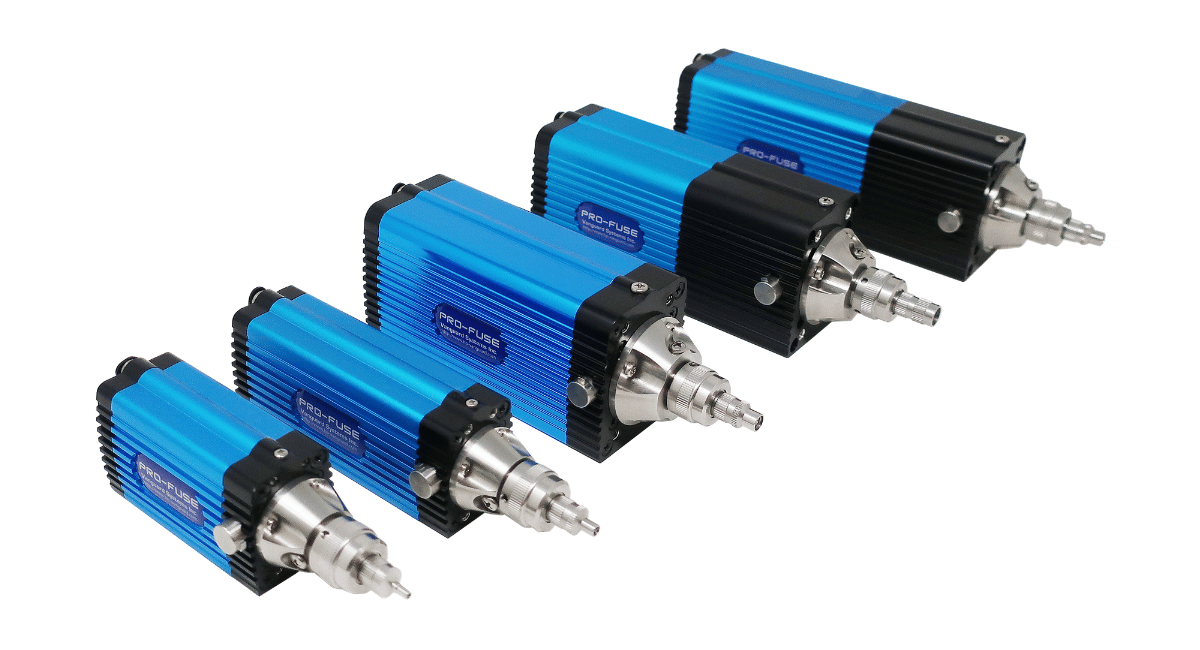
メーカー:株式会社バンガードシステムズ特徴:締付トルク10mN・mから最大3200mN・mまで対応。微細ねじから各種材質まで安定した締結品質を実現 小型・軽量設計によりロボット先端への搭載負荷を低減し、装置設計の自由度向上に貢献 使用するねじに合わせたビットカスタマイズに対応。品質管理を支えるトルクチェッカーもご用意 製品ラインナップとトルク範囲 JET-Roboticsにお問い合わせ |
|
|
🏆注目
107人が閲覧しました
メーカー:シナノケンシ株式会社特徴:把持力50Nで3kg程度のものをやさしくつかめ、ストロークもΦ143と大きいため、様々なワークの把持が可能 ハンド中心に穴が開いた中空構造でカメラやセンサを使うなど、構造を活かしたカスタマイズが可能 電源が落ちても機械的に保持するため、不意の停電でもワークの落下を防ぐ |
|
|
🏆注目
142人が閲覧しました
メーカー:シナノケンシ株式会社特徴:把持力110Nで3kg程度のものをやさしくつかめ、開口幅も73mmと大きいため、様々なワークの把持が可能 電源が落ちても機械的に保持するため、不意の停電でもワークの落下を防ぐ トルク、位置、速度など細かな把持力調整が可能なため、たとえば部品把持もできる |
|
|
161人が閲覧しました
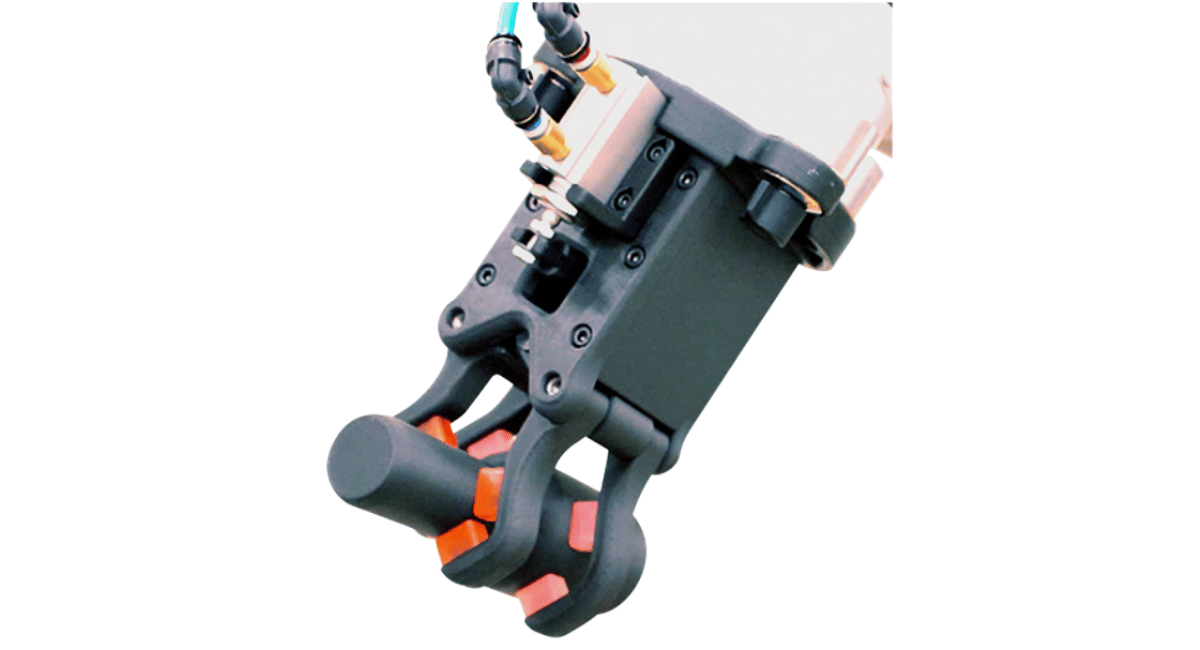
メーカー:株式会社FingerVision特徴:視触覚センサの搭載により、1種類のフィンガータイプで様々なワークのハンドリングを「滑り分布」と「力分布」の情報を活用することで実現。フィンガーラインナップも随時追加。センサ・電動グリッパ・制御PC(laptopもしくはdesktop)のセットで購入可能(写真1枚目) カメラ画質に優位性のあるParallelタイプ(写真2枚目)や、機能性(形状や薄さなど)に優れたAngleタイプ(写真3枚目)など、用途に合わせてカメラタイプの選択が可能 曲面形状の把持面により、円筒形のワークや束ねられているワーク、小型のウエハなどのハンドリングを実現するCy11(写真4枚目) 指先よりも細い形状により、バラ積みなどのPick時のスペースが狭いワークや小型ワークへの汎用的な対応を実現するSS2(写真5枚目) 従来形状のバージョンアップタイプ。グリッパからの距離を近くすることで把持力をロスなく伝達できるα on β(写真6枚目) カップ状かつ把持面に凹凸を作ることで摩擦を作り、食材に代表される柔らかく、不定形なワークに対して、少ない把持力でのナイーブなハンドリングを実現するM6(写真7枚目) ※写真は開発中のもののため、製品版は若干変更になる可能性あり JET-Roboticsにお問い合わせ |
|
|
131人が閲覧しました
メーカー:モーションリブ株式会社特徴:「加減が伝わる×感触を感じる」属人作業を解放する人スキルの簡単ティーチング リーダー/フォロワーの2台のユニバーサルロボットをURHで接続し、互いの動き・トルクをリアルタイムに同期させることで、離れた場所の「感触」「力加減」をリアルに伝え合うことが可能(写真2枚目) ロボットを遠隔操作したときの動作データ(位置・速度・力)を抽出して記録ができるため、熟練作業動作の解析に使用したり、ロボットに同じ動作・力を再現させて自動化が可能(写真3枚目) URHは外付けのシステムであるため、ユニバーサルロボットに簡単に導入ができる 危険環境・クリーン環境の遠隔化や離れた拠点間での移動コスト削減が活用シーン例 JET-Roboticsにお問い合わせ |
|
|
127人が閲覧しました
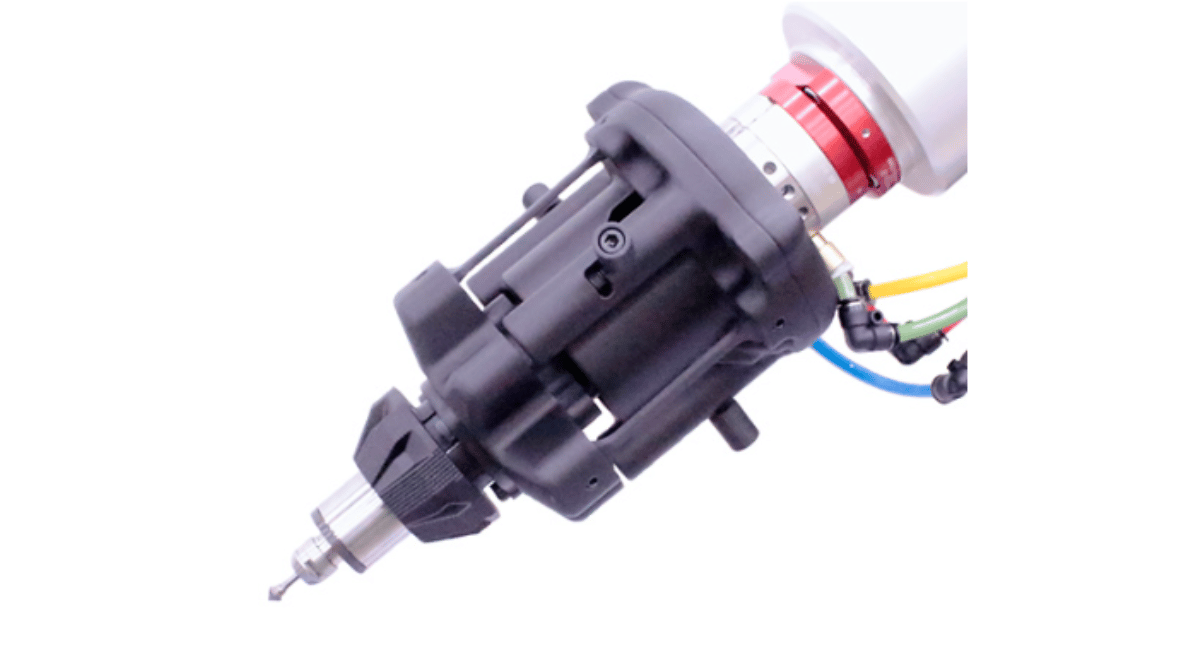
メーカー パナソニック株式会社 エレクトリックワークス社特徴:低反力・高出力で小型協働ロボット※1にも接続可能 締付作業データー(トルク値、波形、作業時間など)を無線で記録可能 無線通信制御で「ボルトかじり検出」※2など、各種作業アシスト機能の設定が可能 ※1:ブラケットの形状、締付条件によって対応できるロボットは異なるため、実作業での事前確認が必要です。 ※2:実際の作業では、周囲条件(締付ボルト・部材・固定方法等)により、変化します。実作業での事前確認が必要です。 |
|
|
123人が閲覧しました
メーカー:トークシステム株式会社特徴:直線移動のクランプ・アンクランプを力を入れずにワンタッチで行えるロック機構です。 エアを供給するとシャフトをアンクランプ、遮断するとシャフトをクランプします 固定の間、電気・エアの動力不要(カラクリ機構採用) 両端のリニアプッシュにより、かんたんにユニット化が可能 動作保証は50万回、摩耗ほぼなし ならいユニットの機構に用いれば、1ユニットで複数のワークを扱えるロボットハンドを製作可能。吸着(写真2枚目)・搬送・把持(写真3枚目)(写真の2枚目、3枚目に使用しているのはクイッククランパーエレメントです) |
|
|
191人が閲覧しました
メーカー:株式会社 キトー特徴:実績のあるER2ボディが採用されており、高耐久性と豊富な安全機能を備える 高い応答性と超低速動作による、サイクルタイム短縮と安全性 専用iOSアプリにより設定を簡単にカスタマイズ |
|
|
205人が閲覧しました
メーカー / 代理店:フォームハンド / 株式会社IZUSHI特徴:吸着ハンドが苦手とする表面が粗い、湾曲形状、多孔質といった物体への吸着可能 高いグリップ性を発揮し、表面形状が複雑な物体に対しても安定した吸着・搬送が可能 多孔質な物体に対して、グリップパッド表面と対象物の接触面積がある程度確保されれば吸着が可能 ハンドのみの販売も、エアツール全般のセット販売も行っている ハンド製品 |
|
|
216人が閲覧しました
メーカー / 代理店:富士精工株式会社特徴:CFRP採用と内部中空化で軽量化、可搬重量が小さいロボットアームにも対応 反時計所のカスタマイズにより、多種多様なワーク形状に対応 90%オーダーメイドで作成しているのでワークに応じて最適なロボットハンドをご提案 |
|
|
257人が閲覧しました
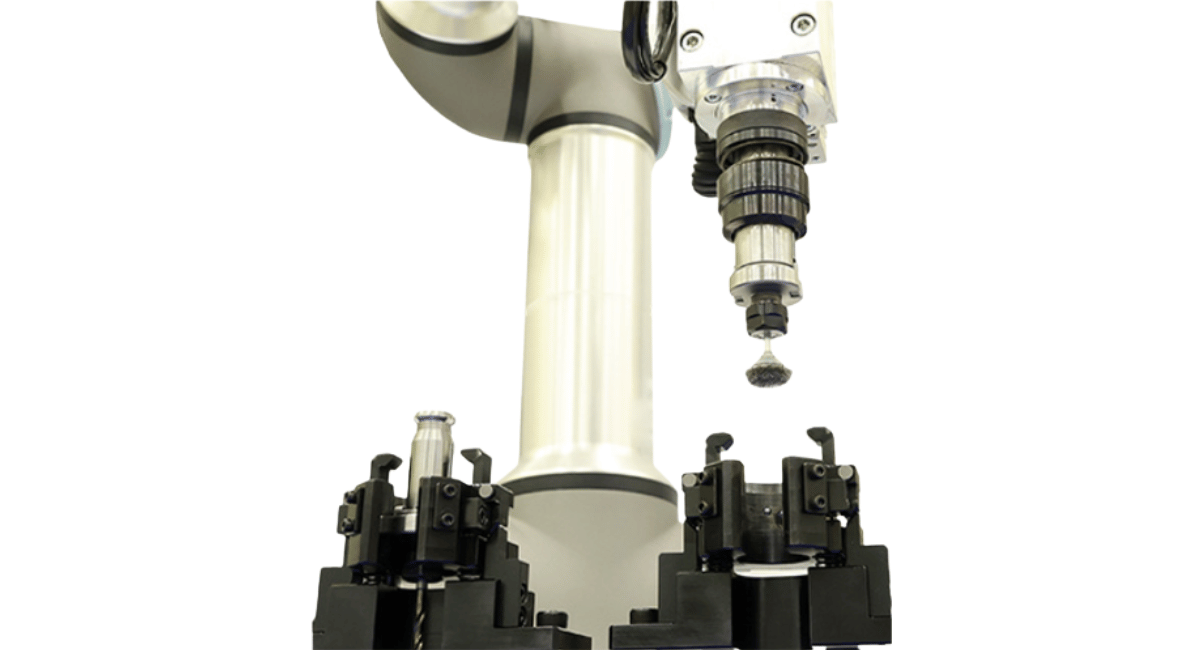
メーカー / 代理店:富士精工株式会社特徴:高フロート量で複雑ワークにも追従し、安定してバリを除去 軽量ボディで可搬重量が小さいロボットアームにも対応 90%オーダーメイドで作成しているのでワークに応じて最適なエンドエフェクタをご提案 |
|
|
194人が閲覧しました
メーカー / 代理店:富士精工株式会社特徴:高複数のハンドチェンジャー不要で投資削減に貢献 動力源不要で簡単ツールチェンジ ワークに応じて最適なサイズをご提案 JET-Roboticsに問い合わせる |
ロボット周辺機器のカタログ(11件)
最新のダウンロード
※当サイト全体のカタログダウンロード履歴を表示しています。
導入などでお困りでしたら以下からお気軽にご相談ください。
JET-Roboticsに問い合わせる
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。